
Aufrufe: 0 Autor: Site-Editor Veröffentlichungszeit: 30.06.2026 Herkunft: Website

Die integrierten Servomotoren von BESFOC für Robotergreifer bieten kompakte, präzise und intelligente Bewegungssteuerungslösungen. Mit integrierten Antriebs- und Feedbacksystemen verbessern sie die Greifgenauigkeit, Effizienz und Zuverlässigkeit von Robotern für industrielle Automatisierungsanwendungen.
Die rasante Entwicklung der industriellen Automatisierung, der kollaborativen Roboter und der intelligenten Fertigung hat die Nachfrage nach kompakteren, präziseren und effizienteren Bewegungssteuerungslösungen erhöht. Unter den Schlüsselkomponenten, die die Roboterleistung bestimmen, spielt das Robotergreifer-Aktuatorsystem eine wesentliche Rolle bei der Erzielung einer präzisen Objekthandhabung, einer zuverlässigen Greifkraft und einer flexiblen Automatisierung.
Herkömmliche Robotergreifsysteme erfordern normalerweise separate Motoren, Treiber, Steuerungen und komplexe Verkabelungssysteme. Diese Struktur erhöht die Installationsschwierigkeiten, verringert die Systemzuverlässigkeit und schränkt die Flexibilität von Roboterkonstruktionen ein. Das Aufkommen des integrierten Servomotors für Robotergreifer bietet eine neue Lösung, indem er Motor, Treiber, Encoder und Steuerelektronik in einer kompakten Einheit vereint.
Ein integrierter Servomotor ermöglicht Robotergreifern eine hochpräzise Positionierung, Echtzeit-Feedbacksteuerung, schnelle Reaktion und ein vereinfachtes mechanisches Design , wodurch sie häufig in Industrierobotern, kollaborativen Robotern (Cobots), automatisierten Montagesystemen, intelligenter Logistik und Präzisionsfertigungsgeräten eingesetzt werden.
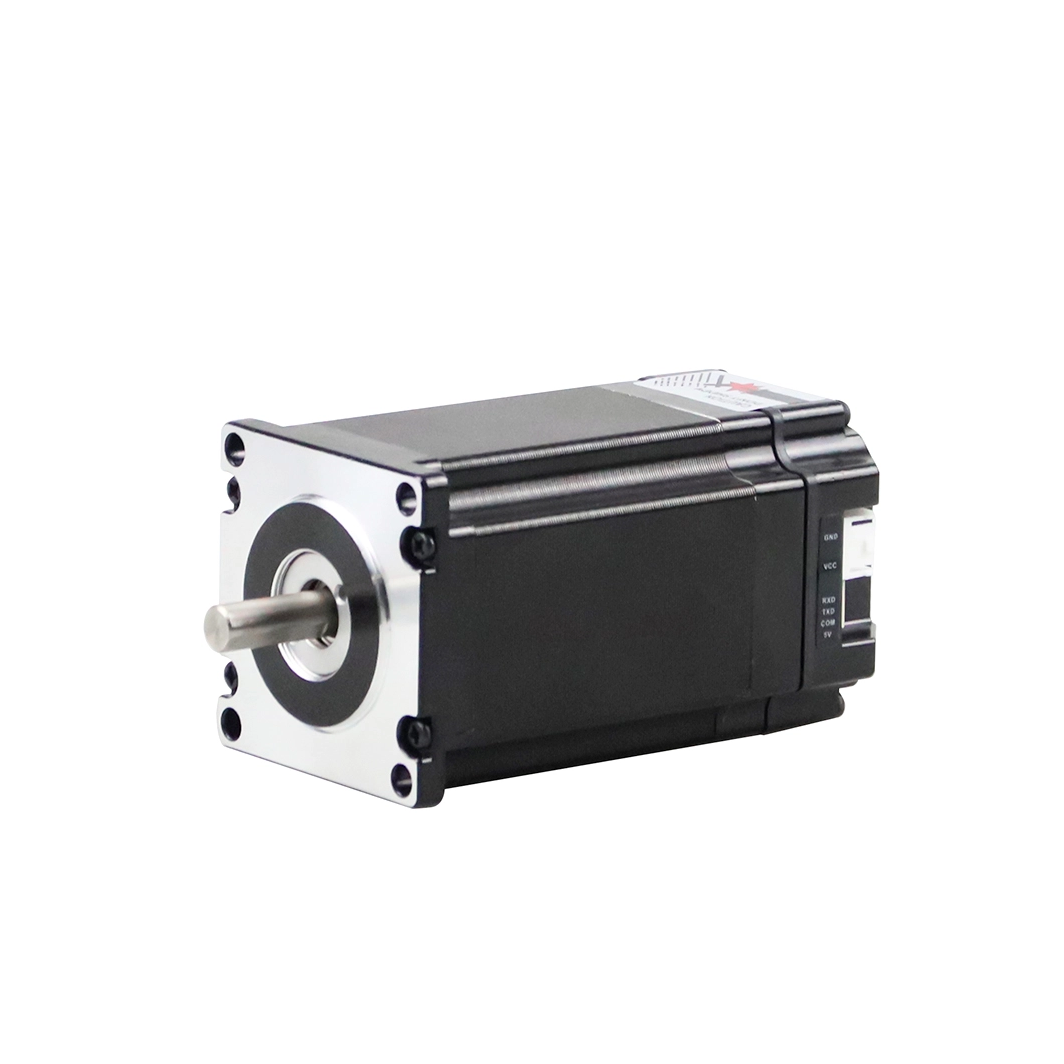
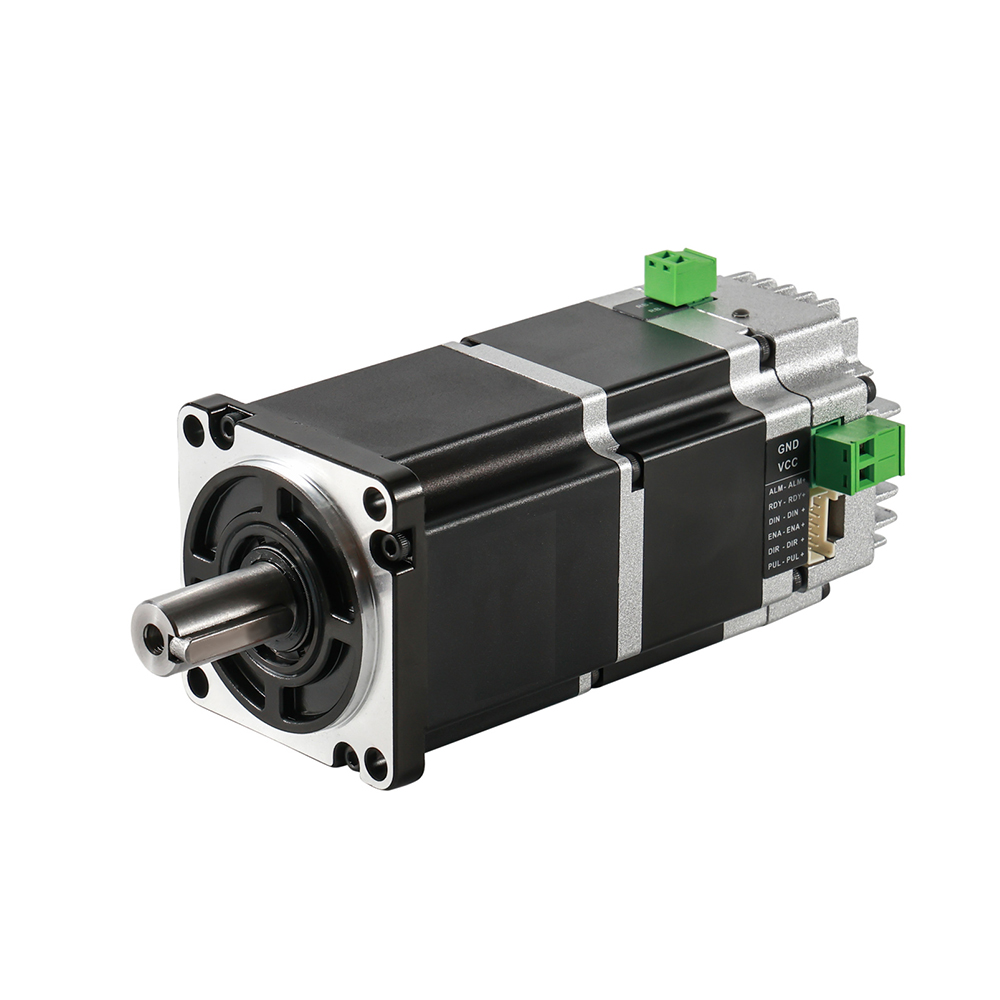
Ein Der integrierte Servomotor ist ein Bewegungssteuerungsgerät, das mehrere Komponenten in einer einzigen kompakten Baugruppe integriert, darunter:
Bürstenloser Gleichstrom-Servomotor oder Servomotor
Servoantriebselektronik
Hochauflösender Encoder
Motion-Controller-Schnittstelle
Kommunikationssystem
Algorithmus zur Positions- und Geschwindigkeitsregelung
Beim Einsatz in einem Robotergreifer steuert der integrierte Servomotor direkt das Öffnen, Schließen, die Greifkraft und die Positionierungsgenauigkeit des Greifmechanismus.
Im Vergleich zu herkömmlichen Servosystemen, die externe Servoantriebe und zusätzliche Verkabelung erfordern, bietet ein integrierter Servomotor eine kompaktere und effizientere Architektur.
Der Motor kann Befehle von der Robotersteuerung empfangen und Drehmoment, Geschwindigkeit und Position automatisch entsprechend den Rückmeldungssignalen des Encoders anpassen. Dadurch können Robotergreifer unterschiedliche Objekte präziser und stabiler handhaben.

|
|

|

|

|
|
Integrierter Schritt-Servomotor |
Integrierter Schritt-Servomotor |
Integrierter BLDC-Servomotor |
Integrierter BLDC-Servomotor |
Integrierter BLDC-Servomotor |
Integrierter BLDC-Servomotor |

|

|

|

|

|
|---|---|---|---|---|
Welle |
Anschlussgehäuse |
Schneckengetriebe |
Planetengetriebe |
Leitspindel |

|

|

|

|

|
Lineare Bewegung |
Kugelumlaufspindel |
Bremse |
IP-Ebene |

|

|

|

|

|

|
|---|---|---|---|---|---|
Aluminium-Riemenscheibe |
Wellenstift |
Einzelner D-Schaft |
Hohlwelle |
Kunststoffrolle |
Gang |

|

|

|

|

|

|
Rändelung |
Wälzfräserwelle |
Schraubenwelle |
Hohlwelle |
Doppelter D-Schaft |
Keilnut |
Robotergreifer werden oft benötigt, um Produkte unterschiedlicher Größe, Form und Material zu handhaben. Ob elektronische Bauteile, Automobilteile, medizinische Geräte oder Verpackungsprodukte – der Greifer muss die Bewegung präzise steuern.
Ein integrierter Servomotor sorgt für:
Hohe Positioniergenauigkeit
Regelung im geschlossenen Regelkreis
Fehlerkorrektur in Echtzeit
Stabile Wiederholgenauigkeit
Der eingebaute Encoder überwacht kontinuierlich die Motorposition und sendet Rückmeldungssignale an das Steuerungssystem. Bei einer Positionsabweichung gleicht das Servosystem automatisch aus, um eine präzise Bewegung aufrechtzuerhalten.
Dies ist besonders wichtig für Anwendungen, die Präzision im Mikrometer- oder Millimeterbereich erfordern, wie z. B. Halbleitermontage- und Präzisionsprüfsysteme.
Moderne Roboter werden kleiner, leichter und intelligenter. Herkömmliche Motorsysteme erfordern häufig:
Externe Servoantriebe
Große Schaltschränke
Komplexe Verkabelung
Zusätzliche Anschlüsse
Diese Komponenten erhöhen den Bauraum und die Wartungskosten.
Der Integrierter Servomotor für Robotergreiferanwendungen reduziert die Systemkomplexität durch die Kombination von Antrieb und Motor in einem Paket.
Zu den Vorteilen gehören:
Reduziertes Gewicht des Roboterarms
Kleinere mechanische Struktur
Einfachere Installation
Geringerer Verkabelungsaufwand
Verbesserte Systemzuverlässigkeit
Für Roboter-Endeffektoren, bei denen der verfügbare Platz begrenzt ist, bieten kompakte integrierte Servolösungen erhebliche Vorteile.
Eine große Herausforderung für Robotergreifer ist die Steuerung der richtigen Greifkraft.
Zu viel Kraft kann zerbrechliche Produkte beschädigen, während zu wenig Kraft zum Verrutschen von Gegenständen führen kann.
Integrierte Servomotoren unterstützen eine intelligente Drehmomentsteuerung, sodass Robotergreifer die Kraft entsprechend den Anwendungsanforderungen anpassen können.
Zum Beispiel:
Der Umgang mit Glasprodukten erfordert sanftes Greifen
Automobilkomponenten erfordern eine stärkere Haltekraft
Medizinische Geräte erfordern eine präzise und stabile Bewegung
Durch die Drehmomentregelung im geschlossenen Regelkreis kann der integrierte Servomotor einen konstanten Greifdruck aufrechterhalten und die Produktqualität verbessern.
In Hochgeschwindigkeitsproduktionsumgebungen müssen Robotersysteme sich wiederholende Vorgänge schnell und präzise ausführen.
Integrierte Servomotoren bieten:
Schnelle Beschleunigung und Verzögerung
Hohe dynamische Reaktion
Reibungslose Bewegungssteuerung
Reduzierte Betriebsverzögerungen
Bei automatisierten Montagelinien verbessert eine schnellere Greiferreaktion direkt die Produktionseffizienz.
Anwendungen wie:
Pick-and-Place-Roboter
Verpackungsroboter
Sortiersysteme
Montageroboter
Profitieren Sie von den schnellen Reaktionseigenschaften der integrierten Servotechnik.
Die Annahme von Integrierte Servomotoren in Robotergreiferanwendungen bringen erhebliche Verbesserungen bei der Bewegungssteuerung, der Systemeffizienz und der Automatisierungsleistung. Durch die Kombination von Motor, Servoantrieb, Encoder und Steuerelektronik in einer einzigen kompakten Einheit bieten integrierte Servolösungen eine flexiblere und zuverlässigere Alternative zu herkömmlichen Motorsystemen.
Einer der größten Vorteile eines integrierten Servomotors für Robotergreifer ist seine kompakte Bauweise. Herkömmliche Servosysteme erfordern in der Regel separate Motoren, Antriebe, Steuerungen und eine komplexe Verkabelung, was den Installationsraum und die Systemkomplexität erhöht.
Integrierte Servomotoren kombinieren mehrere Komponenten in einer Einheit und helfen Roboterherstellern dabei, Folgendes zu erreichen:
Reduzierte Aktuatorgröße
Geringeres Gewicht des Roboterarms
Vereinfachtes mechanisches Design
Einfachere Installation in begrenzten Räumen
Dieses kompakte Design ist besonders wertvoll für kollaborative Roboter, leichte Roboterarme und End-of-Arm-Tooling-Systeme , bei denen Platz und Gewicht entscheidende Faktoren sind.
Robotergreifer erfordern eine genaue Positionierung, um verschiedene Objekte aufzunehmen, zu platzieren und zusammenzubauen. Integrierte Servomotoren sorgen über integrierte Encoder für eine Regelung im geschlossenen Regelkreis und ermöglichen so eine Echtzeitüberwachung und -korrektur der Motorposition.
Zu den wichtigsten Vorteilen gehören:
Hohe Positioniergenauigkeit
Verbesserte Wiederholgenauigkeit
Reduzierte Positionierungsfehler
Stabile Greifleistung
Im Vergleich zu Motorlösungen mit offenem Regelkreis können integrierte Servomotoren Laständerungen und externe Störungen automatisch ausgleichen und so einen zuverlässigeren Roboterbetrieb gewährleisten.
Unterschiedliche Produkte erfordern unterschiedliche Greifkräfte. Zerbrechliche Bauteile erfordern eine schonende Handhabung, während schwerere Teile eine stärkere Haltekraft erfordern.
Integrierte Servomotoren unterstützen eine präzise Drehmomentsteuerung, sodass Robotergreifer die Greifkraft entsprechend den Anwendungsanforderungen anpassen können.
Dadurch können Roboter Folgendes sicher handhaben:
Elektronische Komponenten
Glasprodukte
Medizinische Geräte
Automobilteile
Verpackungsmaterialien
Eine genaue Kraftsteuerung trägt dazu bei, Produktschäden zu reduzieren und die Produktionskonsistenz zu verbessern.
Moderne Automatisierungssysteme erfordern, dass Roboter Aufgaben schnell und gleichzeitig präzise erledigen. Integrierte Servomotoren bieten eine hervorragende dynamische Leistung mit schneller Beschleunigung, Verzögerung und Reaktionsgeschwindigkeit.
Zu den Vorteilen gehören:
Kürzere Betriebszyklen
Schnellere Greif- und Freigabevorgänge
Sanfte Bewegungsübergänge
Verbesserte Produktionseffizienz
Bei Hochgeschwindigkeitsanwendungen wie automatisierten Montagelinien, Sortiersystemen und Roboter-Kommissioniergeräten verbessert eine schnellere Motorreaktion direkt die Gesamtproduktivität.
Herkömmliche Servosysteme erfordern oft eine komplizierte Verkabelung zwischen Motoren, Antrieben, Steuerungen und Feedback-Geräten. Dies erhöht die Installationszeit und die Wartungsschwierigkeiten.
Integrierte Servomotoren vereinfachen die Systemarchitektur, indem sie Folgendes reduzieren:
Stromkabel
Encoderkabel
Externe Laufwerksanschlüsse
Anforderungen an den Schaltschrank
Mit Kommunikationsschnittstellen wie CANopen, RS485, Modbus oder EtherCAT lassen sich integrierte Servomotoren einfach mit Industrierobotern und Automatisierungssteuerungen verbinden.
Zu den Hauptvorteilen integrierter Servomotoren für Robotergreiferanwendungen gehören kompaktes Design, präzise Bewegungssteuerung, intelligentes Kraftmanagement, schnelle Reaktion, einfache Integration und verbesserte Zuverlässigkeit. Durch die Vereinfachung der Aktuatorstruktur bei gleichzeitiger Leistungssteigerung tragen integrierte Servomotoren dazu bei, dass Robotersysteme eine höhere Effizienz und größere Flexibilität erreichen.
Für Branchen, die fortschrittliche Automatisierungslösungen suchen, bieten integrierte Servomotoren eine effektive Möglichkeit, die Leistung von Robotergreifern zu verbessern und die Weiterentwicklung der intelligenten Fertigung zu unterstützen.
Besonderheit |
Integrierter Servomotor |
Traditionelles Servosystem |
|---|---|---|
Motor und Fahrer |
Integriert |
Separate |
Installation |
Einfach |
Komplex |
Verdrahtung |
Reduziert |
Mehr Kabel |
Größe |
Kompakt |
Größer |
Wartung |
Einfacher |
Komplizierter |
Systemflexibilität |
Hoch |
Mäßig |
Anwendungseignung |
Robotik, Automatisierung, Kompaktgeräte |
Große Industriemaschinen |
Für Robotergreifanwendungen, bei denen Platz, Gewicht und Reaktionsgeschwindigkeit entscheidend sind, bieten integrierte Servomotoren eine effizientere Lösung.
In der Fertigung eingesetzte Industrieroboter benötigen zuverlässige Greifsysteme für sich wiederholende Vorgänge.
Integrierte Servomotoren verhelfen Robotergreifern zu Folgendem:
Genaue Teilepositionierung
Stabile Greifkraft
Langfristige Betriebssicherheit
Zu den gängigen Anwendungen gehören:
Automobilbau
Elektronikmontage
Metallbearbeitung
Maschinenpflege
Kollaborative Roboter arbeiten eng mit Menschen zusammen und erfordern eine sicherere und intelligentere Bewegungssteuerung.
Unterstützung integrierter Servomotoren:
Reibungslose Bewegung
Kraftanpassung
Kompaktes Roboterdesign
Sie eignen sich für:
Flexible Produktionslinien
Laborautomatisierung
Kleinserienfertigung
Automatisierte Lagerroboter benötigen häufig Greifer, um unterschiedliche Pakete und Produkte zu handhaben.
Integrierte Servomotorlösungen verbessern:
Sortiergenauigkeit
Handhabungsgeschwindigkeit
Systemzuverlässigkeit
Sie können verwendet werden in:
Roboter-Kommissioniersysteme
Automatisierte Lagersysteme
Intelligente Sortierausrüstung
Medizinische Automatisierung erfordert äußerst präzise Bewegungen.
Integrierte Servomotoren bieten:
Genaue Positionierung
Vibrationsarmer Betrieb
Zuverlässige Kontrolle
Zu den Anwendungen gehören:
Handhabung von Laborproben
Montage medizinischer Geräte
Forschungsautomatisierungsplattformen
Das Richtige auswählen Ein integrierter Servomotor für einen Robotergreifer ist für präzises Greifen, stabilen Betrieb und langfristige Zuverlässigkeit unerlässlich. Ein geeigneter Servomotor muss den mechanischen Anforderungen des Greifers entsprechen, einschließlich Drehmoment, Geschwindigkeit, Präzision, Größe, Kommunikationsmethode und Arbeitsumgebung.
Im Gegensatz zu herkömmlichen Motorsystemen vereint ein integrierter Servomotor Motor, Treiber, Encoder und Steuerelektronik in einer kompakten Einheit , sodass der Auswahlprozess stärker auf Leistungsanpassung und Systemkompatibilität ausgerichtet ist.
Bei der Auswahl eines integrierten Servomotors für Robotergreiferanwendungen sollten die folgenden Faktoren berücksichtigt werden.
Der erste Schritt bei der Auswahl eines integrierten Servomotors ist die Berechnung des erforderlichen Drehmoments.
Das Motordrehmoment wirkt sich direkt auf die Greifkraft und die Fähigkeit des Robotergreifers aus, Objekte sicher zu halten.
Wichtige Faktoren sind:
Gewicht des Werkstücks
Mechanische Struktur des Greifers
Reibungskoeffizient zwischen Greiffingern und Objekt
Übertragungseffizienz
Sicherheitsmarge
Ein Motor mit unzureichendem Drehmoment kann Folgendes verursachen:
Objekt verrutscht
Instabiler Griff
Reduzierte Positionierungsgenauigkeit
Ein Motor mit zu hohem Drehmoment kann Folgendes erhöhen:
Systemkosten
Stromverbrauch
Mechanische Belastung
Die Wahl des richtigen Drehmomentbereichs gewährleistet sowohl Leistung als auch Effizienz.
Robotergreifer führen häufig sich wiederholende Vorgänge wie Kommissionieren, Platzieren, Zusammenbauen und Sortieren aus. Daher ist die Bewegungsgenauigkeit ein entscheidender Auswahlfaktor.
Ein integrierter Servomotor mit hochauflösendem Encoder sorgt für:
Genaue Positionsrückmeldung
Bewegungssteuerung mit geschlossenem Regelkreis
Fehlerkorrektur in Echtzeit
Verbesserte Wiederholgenauigkeit
Für Anwendungen wie:
Montage elektronischer Komponenten
Medizinische Automatisierung
Präzisionsfertigung
Eine höhere Encoderauflösung und eine bessere Servosteuerungsleistung werden empfohlen.
Robotergreifer haben in der Regel einen begrenzten Einbauraum, insbesondere wenn sie am Ende eines Roboterarms montiert werden.
Der ausgewählte integrierte Servomotor sollte Folgendes berücksichtigen:
Motordurchmesser
Motorlänge
Gewicht
Montagemethode
Mechanische Schnittstelle
Ein kompaktes Servomotordesign trägt dazu bei, Folgendes zu erreichen:
Leichte Roboter-Endeffektoren
Schnellere Roboterbewegung
Geringere Trägheit
Einfachere mechanische Integration
Bei kollaborativen Robotern und kompakten Automatisierungsgeräten ist die Größenoptimierung besonders wichtig.
Unterschiedliche Robotergreifanwendungen erfordern unterschiedliche Arbeitsgeschwindigkeiten.
Berücksichtigen Sie bei der Auswahl eines integrierten Servomotors Folgendes:
Öffnungs- und Schließgeschwindigkeit
Beschleunigungsanforderungen
Zykluszeit
Kontinuierliche Betriebsfrequenz
Hochgeschwindigkeitsanwendungen wie automatisiertes Sortieren oder Verpacken erfordern Servomotoren mit:
Schnelle Reaktion
Hohe Beschleunigungsfähigkeit
Stabiler Betrieb bei dynamischen Belastungen
Ein richtiges Gleichgewicht zwischen Geschwindigkeit und Drehmoment sorgt für eine effiziente Roboterleistung.
Integrierte Servomotoren müssen mit der Robotersteuerung oder dem Automatisierungssystem kommunizieren.
Zu den gängigen Kommunikationsoptionen gehören:
CANopen
RS485
Modbus RTU
EtherCAT
Impuls- und Richtungssteuerung
Die Kommunikationsmethode sollte zur bestehenden Robotersteuerungsarchitektur passen.
Zum Beispiel:
Einfache Automatisierungsgeräte können eine Impulssteuerung verwenden
Mehrachsige Robotersysteme erfordern möglicherweise eine EtherCAT-Kommunikation
Verteilte Automatisierungssysteme können CANopen-Netzwerke nutzen
Die Auswahl der richtigen Schnittstelle verbessert die Integrationseffizienz und Systemkompatibilität.
Der Encoder ist eine Schlüsselkomponente, die die Genauigkeit des Servomotors bestimmt.
Zu den gängigen Encoder-Optionen gehören:
Inkrementalgeber
Magnetischer Encoder
Optischer Encoder
Absolutwertgeber
Bei Robotergreifern sollte der Encoder Folgendes bieten:
Zuverlässige Positionsrückmeldung
Stabiler Betrieb
Schnelle Reaktion
Hohe Auflösung
Anwendungen, die präzises Greifen und Positionieren erfordern, profitieren in der Regel von leistungsstärkeren Feedbacksystemen.
Die Betriebsumgebung wirkt sich direkt auf die Zuverlässigkeit des Servomotors aus.
Berücksichtigen Sie Bedingungen wie:
Temperaturbereich
Staubexposition
Luftfeuchtigkeit
Vibration
Kontinuierliche Betriebszeit
Wählen Sie für raue Industrieumgebungen integrierte Servomotoren mit:
Starkes Schutzdesign
Bessere Wärmeableitung
Höhere Haltbarkeit
Beispielsweise erfordern Robotersysteme, die in der Lebensmittelverarbeitung, in der Außenautomatisierung oder in industriellen Produktionslinien eingesetzt werden, möglicherweise einen verbesserten Umweltschutz.
Überprüfen Sie vor der Auswahl eines integrierten Servomotors die Kompatibilität mit der verfügbaren Stromversorgung.
Zu den häufigen Faktoren gehören:
Nennspannung
Aktuelle Anforderungen
Stromverbrauch
Elektrische Verbindungsmethode
Eine passende Stromversorgung sorgt für:
Stabiler Motorbetrieb
Reduziertes Überhitzungsrisiko
Längere Lebensdauer
Die Lastart des Robotergreifers beeinflusst die Motorauswahl.
Verschiedene Anwendungen können Folgendes umfassen:
Der Motor arbeitet mit einem relativ stabilen Kraftbedarf.
Die Greifkraft variiert je nach Produkt.
Die Greiferstruktur bzw. Nutzlast erzeugt zusätzliche Trägheit.
Für Anwendungen mit variabler oder hoher Trägheit wird die Auswahl eines integrierten Servomotors mit starker dynamischer Reaktion und Drehmomentanpassungsfähigkeit empfohlen.
Über die technischen Spezifikationen hinaus wirkt sich auch die Leistungsfähigkeit des Lieferanten auf die Systemleistung aus.
Ein zuverlässiger Lieferant sollte Folgendes bieten:
Optionen zur Motoranpassung
Technische Unterstützung
Anwendungsberatung
Produkttests
Langfristige Servicefähigkeit
Für Robotergreiferanwendungen kann eine Anpassung erforderlich sein für:
Motorabmessungen
Ausführung der Abtriebswelle
Kommunikationsprotokolle
Encoder-Optionen
Montagestrukturen
Ein praktischer Auswahlprozess umfasst:
Identifizieren:
Greifertyp
Nutzlastgewicht
Erforderliche Greifkraft
Betriebsgeschwindigkeit
Bestimmen:
Erforderliches Drehmoment
Geschwindigkeitsbereich
Nennleistung
Genauigkeitsanforderungen
Überprüfen:
Motorgröße
Stromspannung
Kommunikationsmethode
Installationskompatibilität
Verifizieren:
Bewegungsgenauigkeit
Reaktionsgeschwindigkeit
Belastbarkeit
Langzeitstabilität
Die Auswahl des richtigen integrierten Servomotors für Robotergreiferanwendungen erfordert eine sorgfältige Berücksichtigung von Drehmoment, Genauigkeit, Geschwindigkeit, Größe, Kommunikation, Rückmeldung und Betriebsbedingungen.
Ein richtig ausgewählter integrierter Servomotor kann Folgendes bieten:
Präzise Greifkontrolle
Höhere Automatisierungseffizienz
Zuverlässige Roboterleistung
Vereinfachte Systemintegration
Durch die Abstimmung der Motorspezifikationen mit den tatsächlichen Anforderungen des Robotergreifers können Hersteller intelligentere, schnellere und zuverlässigere Roboterautomatisierungssysteme bauen.
Mit dem Wachstum von Industrie 4.0 und intelligenter Automatisierung Integrierte Servomotoren werden sich weiter in Richtung höherer Intelligenz und Effizienz weiterentwickeln.
Zu den zukünftigen Trends gehören:
Künstliche Intelligenz und fortschrittliche Algorithmen werden es Robotern ermöglichen, Greifstrategien basierend auf Objekterkennung und Echtzeit-Feedback automatisch zu optimieren.
Servomotoren werden immer kleiner und bieten gleichzeitig ein höheres Drehmoment.
Fortschrittliche Motortechnologie wird den Energieverbrauch senken und die Betriebseffizienz verbessern.
Integrierte Servomotoren werden durch industrielle Kommunikationsnetzwerke stärker vernetzt und unterstützen so intelligente Fabriksysteme.
Der integrierte Servomotor für Robotergreifer bietet eine leistungsstarke Kombination aus kompakter Struktur, präziser Steuerung, intelligenter Rückmeldung und vereinfachter Systemintegration.
Durch die Kombination von Motor, Treiber und Encoder in einer Lösung trägt die integrierte Servotechnologie dazu bei, dass Robotersysteme eine höhere Leistung erzielen und gleichzeitig die Komplexität reduzieren.
Für moderne Automatisierungsindustrien, die schnelle, genaue und zuverlässige Greiflösungen benötigen, werden integrierte Servomotoren zu einer unverzichtbaren Bewegungssteuerungstechnologie, die die nächste Generation intelligenter Robotik unterstützt.
BESFOC-Antwort:
Ein integrierter Servomotor für Robotergreifer ist eine kompakte Bewegungssteuerungslösung, die Motor, Servoantrieb, Encoder und Steuerelektronik in einer Einheit vereint. Die integrierten Servomotoren von BESFOC sind so konzipiert, dass sie eine präzise Positionssteuerung, eine stabile Drehmomentabgabe und eine schnelle Reaktion für Robotergreiferanwendungen bieten. Im Vergleich zu herkömmlichen Servosystemen reduzieren sie die Komplexität der Verkabelung, sparen Installationsraum und verbessern die Gesamtzuverlässigkeit des Systems.
Antwort von BESFOC:
Integrierte Servomotoren von BESFOC bieten mehrere Vorteile für Robotergreifer, darunter hohe Präzision, kompaktes Design, intelligente Steuerung und einfache Integration . Der eingebaute Encoder ermöglicht eine Regelung mit geschlossenem Regelkreis für genaue Positionierung und wiederholbaren Betrieb. Durch die integrierte Struktur werden externe Komponenten und Verkabelung reduziert, wodurch das Robotersystem kompakter, effizienter und einfacher zu warten ist.
BESFOC-Antwort:
Ein integrierter Servomotor verbessert die Leistung des Robotergreifers durch präzise Bewegungssteuerung, einstellbare Greifkraft und schnelle dynamische Reaktion. BESFOC-Servomotoren können Geschwindigkeit, Position und Drehmoment präzise steuern, sodass Robotergreifer verschiedene Objekte sicher und effizient handhaben können. Dadurch eignen sie sich für Anwendungen wie Industrieroboter, kollaborative Roboter, automatisierte Montage und intelligente Fertigungssysteme.
BESFOC-Antwort:
Integrierte BESFOC-Servomotoren werden häufig in verschiedenen Robotergreiferanwendungen eingesetzt, darunter Industrieautomatisierung, Roboterarme, kollaborative Roboter, intelligente Fertigungsausrüstung, Lagerautomatisierung und Präzisionsmontagesysteme . Aufgrund ihrer kompakten Größe und zuverlässigen Steuerungsleistung eignen sie sich für Anwendungen, die präzises Greifen, Positionieren und sich wiederholende Bewegungen erfordern.
BESFOC-Antwort:
Bei der Auswahl eines integrierten Servomotors für einen Robotergreifer sind unter anderem das erforderliche Drehmoment, die Geschwindigkeit, die Positionierungsgenauigkeit, die Motorgröße, die Kommunikationsmethode und die Arbeitsumgebung wichtige Faktoren. BESFOC bietet verschiedene integrierte Servomotorlösungen und Anpassungsoptionen, um spezifische Anforderungen von Roboteranwendungen zu erfüllen und Kunden dabei zu helfen, eine zuverlässige und effiziente Bewegungssteuerung zu erreichen.





















































