
การเข้าชม: 0 ผู้แต่ง: บรรณาธิการเว็บไซต์ เวลาเผยแพร่: 30-06-2026 ที่มา: เว็บไซต์

เซอร์โวมอเตอร์แบบรวมของ BESFOC สำหรับมือจับหุ่นยนต์มอบโซลูชันการควบคุมการเคลื่อนไหวอัจฉริยะที่กะทัดรัด แม่นยำ และ ด้วยระบบขับเคลื่อนและป้อนกลับแบบผสานรวม จะช่วยปรับปรุงความแม่นยำ ประสิทธิภาพ และความน่าเชื่อถือในการจับยึดด้วยหุ่นยนต์สำหรับการใช้งานระบบอัตโนมัติทางอุตสาหกรรม
การพัฒนาอย่างรวดเร็วของระบบอัตโนมัติทางอุตสาหกรรม หุ่นยนต์ร่วมปฏิบัติงาน และการผลิตอัจฉริยะได้เพิ่มความต้องการโซลูชันควบคุมการเคลื่อนไหวที่กะทัดรัด แม่นยำ และมีประสิทธิภาพมากขึ้น ในบรรดาองค์ประกอบหลักที่กำหนดประสิทธิภาพของหุ่นยนต์ ระบบกระตุ้นการทำงานของมือจับแบบหุ่นยนต์ มีบทบาทสำคัญในการบรรลุการจัดการวัตถุที่แม่นยำ แรงจับที่เชื่อถือได้ และระบบอัตโนมัติที่ยืดหยุ่น
ระบบมือจับหุ่นยนต์แบบดั้งเดิมมักจะต้องใช้มอเตอร์ ไดรเวอร์ ตัวควบคุม และระบบสายไฟที่ซับซ้อนแยกกัน โครงสร้างนี้เพิ่มความยากในการติดตั้ง ลดความน่าเชื่อถือของระบบ และจำกัดความยืดหยุ่นของการออกแบบหุ่นยนต์ การเกิดขึ้นของ เซอร์โวมอเตอร์ในตัวสำหรับมือจับแบบหุ่นยนต์ ทำให้เกิดโซลูชันใหม่โดยการรวมมอเตอร์ ตัวขับ ตัวเข้ารหัส และอุปกรณ์อิเล็กทรอนิกส์ควบคุมไว้ในหน่วยเดียวขนาดกะทัดรัด
เซอร์โวมอเตอร์ในตัวช่วยให้มือจับหุ่นยนต์สามารถกำหนด ตำแหน่งที่มีความแม่นยำสูง การควบคุมการตอบสนองแบบเรียลไทม์ การตอบสนองที่รวดเร็ว และการออกแบบกลไกที่เรียบง่าย ทำให้มีการใช้กันอย่างแพร่หลายในหุ่นยนต์อุตสาหกรรม หุ่นยนต์ร่วมปฏิบัติงาน (โคบอท) ระบบประกอบอัตโนมัติ โลจิสติกส์อัจฉริยะ และอุปกรณ์การผลิตที่มีความแม่นยำ
หนึ่ง เซอร์โวมอเตอร์แบบรวม เป็นอุปกรณ์ควบคุมการเคลื่อนไหวที่รวมส่วนประกอบหลายชิ้นไว้ในชุดประกอบขนาดกะทัดรัดชุดเดียว ได้แก่ :
เซอร์โวมอเตอร์กระแสตรงไร้แปรงถ่านหรือเซอร์โวมอเตอร์
เซอร์โวไดรฟ์อิเล็กทรอนิกส์
ตัวเข้ารหัสความละเอียดสูง
อินเทอร์เฟซตัวควบคุมการเคลื่อนไหว
ระบบการสื่อสาร
อัลกอริธึมการควบคุมตำแหน่งและความเร็ว
เมื่อนำไปใช้กับมือจับแบบหุ่นยนต์ เซอร์โวมอเตอร์ในตัวจะควบคุมการเปิด ปิด แรงจับ และความแม่นยำในการกำหนดตำแหน่งของกลไกของมือจับโดยตรง
เมื่อเปรียบเทียบกับระบบเซอร์โวทั่วไปที่ต้องใช้เซอร์โวไดรฟ์ภายนอกและการเดินสายเพิ่มเติม เซอร์โวมอเตอร์ในตัวมีสถาปัตยกรรมที่กะทัดรัดและมีประสิทธิภาพมากขึ้น
มอเตอร์สามารถรับคำสั่งจากตัวควบคุมหุ่นยนต์และปรับแรงบิด ความเร็ว และตำแหน่งโดยอัตโนมัติตามสัญญาณตอบรับจากตัวเข้ารหัส ช่วยให้มือจับแบบหุ่นยนต์สามารถจัดการกับวัตถุต่างๆ ได้อย่างแม่นยำและมีเสถียรภาพมากขึ้น

|
|

|

|

|
|
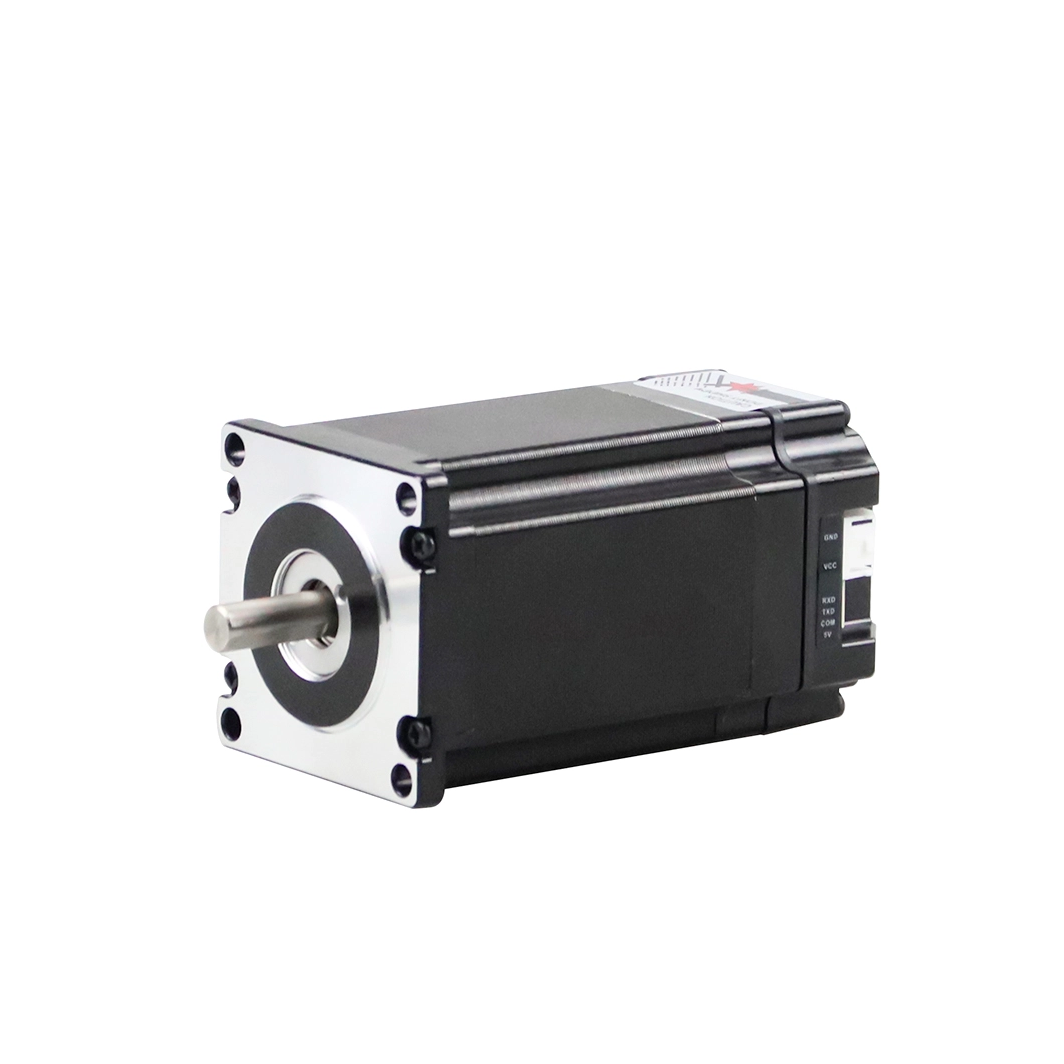
สเต็ปเปอร์เซอร์โวมอเตอร์ในตัว |
สเต็ปเปอร์เซอร์โวมอเตอร์ในตัว |
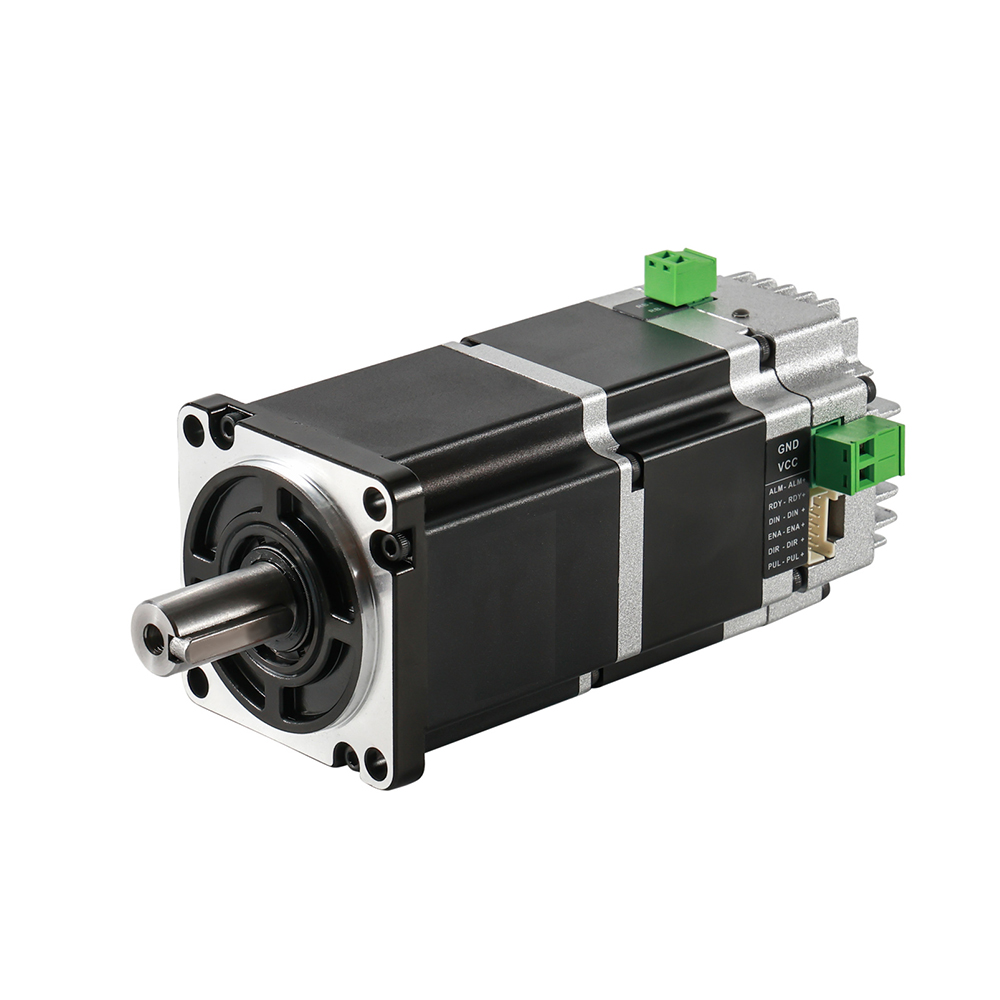
เซอร์โวมอเตอร์ BLDC ในตัว |
เซอร์โวมอเตอร์ BLDC ในตัว |
เซอร์โวมอเตอร์ BLDC ในตัว |
เซอร์โวมอเตอร์ BLDC ในตัว |

|

|

|

|

|
|---|---|---|---|---|
เพลา |
ที่อยู่อาศัยเทอร์มินัล |
กระปุกเกียร์หนอน |
กระปุกเกียร์ดาวเคราะห์ |
ลีดสกรู |

|

|

|

|

|
การเคลื่อนที่เชิงเส้น |
บอลสกรู |
เบรค |
ระดับ IP |

|

|

|

|

|

|
|---|---|---|---|---|---|
รอกอลูมิเนียม |
สลักเพลา |
เพลา D เดี่ยว |
เพลากลวง |
ลูกรอกพลาสติก |
เกียร์ |

|

|

|

|

|

|
ปั้นนูน |
เพลา Hobbing |
เพลาสกรู |
เพลากลวง |
ดับเบิ้ลดีเพลา |
รูกุญแจ |
มือจับแบบหุ่นยนต์มักต้องใช้ในการจัดการผลิตภัณฑ์ที่มีขนาด รูปร่าง และวัสดุต่างกัน ไม่ว่าจะหยิบจับชิ้นส่วนอิเล็กทรอนิกส์ ชิ้นส่วนยานยนต์ อุปกรณ์ทางการแพทย์ หรือผลิตภัณฑ์บรรจุภัณฑ์ มือจับจะต้องควบคุมการเคลื่อนไหวอย่างแม่นยำ
เซอร์โวมอเตอร์ในตัวให้:
ความแม่นยำของตำแหน่งสูง
การควบคุมวงปิด
การแก้ไขข้อผิดพลาดแบบเรียลไทม์
การทำซ้ำได้อย่างมีเสถียรภาพ
ตัวเข้ารหัสในตัวจะตรวจสอบตำแหน่งมอเตอร์อย่างต่อเนื่องและส่งสัญญาณตอบรับไปยังระบบควบคุม หากมีการเบี่ยงเบนตำแหน่ง ระบบเซอร์โวจะชดเชยโดยอัตโนมัติเพื่อรักษาการเคลื่อนไหวที่แม่นยำ
นี่เป็นสิ่งสำคัญอย่างยิ่งสำหรับการใช้งานที่ต้องการความแม่นยำระดับไมครอนหรือระดับมิลลิเมตร เช่น การประกอบเซมิคอนดักเตอร์และระบบตรวจสอบความแม่นยำ
หุ่นยนต์สมัยใหม่มีขนาดเล็กลง เบาขึ้น และชาญฉลาดมากขึ้น ระบบมอเตอร์แบบดั้งเดิมมักต้องการ:
เซอร์โวไดรฟ์ภายนอก
ตู้ควบคุมขนาดใหญ่
การเดินสายไฟที่ซับซ้อน
ขั้วต่อเพิ่มเติม
ส่วนประกอบเหล่านี้เพิ่มพื้นที่การติดตั้งและค่าบำรุงรักษา
ที่ เซอร์โวมอเตอร์ในตัว สำหรับการใช้งานมือจับหุ่นยนต์ ช่วยลดความซับซ้อนของระบบโดยการรวมไดรฟ์และมอเตอร์ไว้ในแพ็คเกจเดียว
สิทธิประโยชน์ ได้แก่:
ลดน้ำหนักแขนหุ่นยนต์
โครงสร้างทางกลที่เล็กลง
การติดตั้งที่ง่ายขึ้น
ข้อกำหนดการเดินสายไฟที่ต่ำกว่า
ปรับปรุงความน่าเชื่อถือของระบบ
สำหรับหุ่นยนต์ส่วนปลายเอฟเฟกต์ซึ่งมีพื้นที่จำกัด โซลูชันเซอร์โวในตัวขนาดกะทัดรัดจะให้ข้อได้เปรียบที่สำคัญ
ความท้าทายที่สำคัญสำหรับมือจับแบบหุ่นยนต์คือการควบคุมแรงจับที่ถูกต้อง
การใช้แรงมากเกินไปอาจทำให้ผลิตภัณฑ์ที่เปราะบางเสียหายได้ ในขณะที่แรงที่ไม่เพียงพออาจทำให้วัตถุลื่นไถลได้
เซอร์โวมอเตอร์ในตัวรองรับการควบคุมแรงบิดอัจฉริยะ ช่วยให้มือจับหุ่นยนต์สามารถปรับแรงได้ตามความต้องการในการใช้งาน
ตัวอย่างเช่น:
การจัดการผลิตภัณฑ์แก้วต้องใช้การจับอย่างอ่อนโยน
ชิ้นส่วนยานยนต์ต้องการแรงยึดเกาะที่แข็งแกร่งยิ่งขึ้น
อุปกรณ์การแพทย์ต้องมีการเคลื่อนไหวที่แม่นยำและมั่นคง
ด้วยการควบคุมแรงบิดแบบวงปิด เซอร์โวมอเตอร์ในตัวสามารถรักษาแรงกดในการจับที่สม่ำเสมอและปรับปรุงคุณภาพของผลิตภัณฑ์
ในสภาพแวดล้อมการผลิตที่มีความเร็วสูง ระบบหุ่นยนต์จะต้องดำเนินการซ้ำๆ อย่างรวดเร็วและแม่นยำ
เซอร์โวมอเตอร์ในตัวให้:
การเร่งความเร็วและการชะลอตัวอย่างรวดเร็ว
การตอบสนองแบบไดนามิกสูง
ควบคุมการเคลื่อนไหวได้อย่างราบรื่น
ลดความล่าช้าในการดำเนินงาน
สำหรับสายการประกอบแบบอัตโนมัติ การตอบสนองของมือจับที่เร็วขึ้นจะช่วยเพิ่มประสิทธิภาพการผลิตได้โดยตรง
การใช้งานเช่น:
หุ่นยนต์หยิบและวาง
หุ่นยนต์บรรจุภัณฑ์
ระบบการเรียงลำดับ
หุ่นยนต์ประกอบ
ได้รับประโยชน์จากลักษณะการตอบสนองที่รวดเร็วของเทคโนโลยีเซอร์โวแบบรวม
การรับเลี้ยงบุตรบุญธรรมของ เซอร์โวมอเตอร์แบบรวม ในการใช้งานมือจับหุ่นยนต์ นำมาซึ่งการปรับปรุงที่สำคัญในการควบคุมการเคลื่อนไหว ประสิทธิภาพของระบบ และประสิทธิภาพของระบบอัตโนมัติ ด้วยการรวมมอเตอร์ เซอร์โวไดรฟ์ ตัวเข้ารหัส และอุปกรณ์อิเล็กทรอนิกส์ควบคุมไว้ในหน่วยขนาดกะทัดรัดเพียงตัวเดียว โซลูชันเซอร์โวแบบรวมจึงเป็นทางเลือกที่ยืดหยุ่นและเชื่อถือได้มากกว่าระบบมอเตอร์แบบดั้งเดิม
ข้อดีที่ใหญ่ที่สุดประการหนึ่งของ เซอร์โวมอเตอร์ในตัวสำหรับมือจับแบบหุ่นยนต์ คือโครงสร้างที่กะทัดรัด ระบบเซอร์โวแบบเดิมมักจะต้องใช้มอเตอร์ ไดรฟ์ ตัวควบคุม และสายไฟที่ซับซ้อนแยกกัน ซึ่งเพิ่มพื้นที่การติดตั้งและความซับซ้อนของระบบ
เซอร์โวมอเตอร์ในตัวรวมส่วนประกอบต่างๆ ไว้ในหน่วยเดียว ช่วยให้ผู้ผลิตหุ่นยนต์บรรลุผล:
ขนาดตัวกระตุ้นลดลง
ลดน้ำหนักแขนหุ่นยนต์
การออกแบบทางกลที่เรียบง่าย
ติดตั้งง่ายในพื้นที่จำกัด
การออกแบบที่กะทัดรัดนี้มีประโยชน์อย่างยิ่งสำหรับ หุ่นยนต์ร่วมปฏิบัติงาน แขนหุ่นยนต์น้ำหนักเบา และระบบเครื่องมือที่ส่วนปลายแขน ซึ่งพื้นที่และน้ำหนักเป็นปัจจัยสำคัญ
มือจับแบบหุ่นยนต์ต้องมีการวางตำแหน่งที่แม่นยำในการหยิบ วาง และประกอบวัตถุต่างๆ เซอร์โวมอเตอร์ในตัวให้ การควบคุมวงปิด ผ่านตัวเข้ารหัสในตัว ช่วยให้สามารถตรวจสอบและแก้ไขตำแหน่งมอเตอร์แบบเรียลไทม์
ประโยชน์ที่สำคัญ ได้แก่ :
ความแม่นยำของตำแหน่งสูง
ปรับปรุงความสามารถในการทำซ้ำ
ลดข้อผิดพลาดในการวางตำแหน่ง
ประสิทธิภาพการยึดเกาะที่มั่นคง
เมื่อเปรียบเทียบกับโซลูชันมอเตอร์แบบวงรอบเปิด เซอร์โวมอเตอร์ในตัวสามารถชดเชยการเปลี่ยนแปลงโหลดและการรบกวนภายนอกได้โดยอัตโนมัติ ทำให้มั่นใจได้ถึงการทำงานของหุ่นยนต์ที่เชื่อถือได้มากขึ้น
ผลิตภัณฑ์ที่แตกต่างกันต้องใช้แรงยึดเกาะที่แตกต่างกัน ส่วนประกอบที่เปราะบางจำเป็นต้องมีการจัดการอย่างนุ่มนวล ในขณะที่ชิ้นส่วนที่หนักกว่านั้นต้องการแรงยึดที่แข็งแกร่งกว่า
เซอร์โวมอเตอร์ในตัว รองรับการควบคุมแรงบิดที่แม่นยำ ช่วยให้มือจับหุ่นยนต์สามารถปรับแรงจับตามความต้องการในการใช้งาน
สิ่งนี้ทำให้หุ่นยนต์สามารถจัดการได้อย่างปลอดภัย:
ชิ้นส่วนอิเล็กทรอนิกส์
ผลิตภัณฑ์แก้ว
อุปกรณ์การแพทย์
ชิ้นส่วนยานยนต์
วัสดุบรรจุภัณฑ์
การควบคุมแรงที่แม่นยำช่วยลดความเสียหายของผลิตภัณฑ์และเพิ่มความสม่ำเสมอในการผลิต
ระบบอัตโนมัติสมัยใหม่จำเป็นต้องใช้หุ่นยนต์เพื่อทำงานให้เสร็จสิ้นอย่างรวดเร็วโดยยังคงความแม่นยำไว้ เซอร์โวมอเตอร์ในตัวให้ประสิทธิภาพไดนามิกที่ยอดเยี่ยมพร้อมการเร่งความเร็ว การชะลอตัว และความเร็วการตอบสนองที่รวดเร็ว
ข้อดีได้แก่:
รอบการทำงานสั้นลง
จับและปล่อยการกระทำได้เร็วขึ้น
การเปลี่ยนการเคลื่อนไหวที่ราบรื่น
ปรับปรุงประสิทธิภาพการผลิต
สำหรับการใช้งานที่มีความเร็วสูง เช่น สายการประกอบอัตโนมัติ ระบบคัดแยก และอุปกรณ์หยิบของด้วยหุ่นยนต์ การตอบสนองของมอเตอร์ที่เร็วขึ้นจะช่วยเพิ่มประสิทธิภาพการผลิตโดยรวมได้โดยตรง
ระบบเซอร์โวแบบเดิมมักเกี่ยวข้องกับการเดินสายที่ซับซ้อนระหว่างมอเตอร์ ชุดขับเคลื่อน ตัวควบคุม และอุปกรณ์ป้อนกลับ สิ่งนี้จะเพิ่มเวลาการติดตั้งและความยากในการบำรุงรักษา
เซอร์โวมอเตอร์ในตัวทำให้สถาปัตยกรรมระบบง่ายขึ้นโดยการลด:
สายไฟ
สายเข้ารหัส
การเชื่อมต่อไดรฟ์ภายนอก
ข้อกำหนดของตู้ควบคุม
ด้วยอินเทอร์เฟซการสื่อสาร เช่น CANopen, RS485, Modbus หรือ EtherCAT ทำให้เซอร์โวมอเตอร์ในตัวสามารถเชื่อมต่อกับหุ่นยนต์อุตสาหกรรมและตัวควบคุมอัตโนมัติได้อย่างง่ายดาย
ข้อ ได้เปรียบที่สำคัญของเซอร์โวมอเตอร์ในตัวสำหรับการใช้งานมือจับหุ่นยนต์ ได้แก่ การออกแบบที่กะทัดรัด การควบคุมการเคลื่อนไหวที่แม่นยำ การจัดการแรงอัจฉริยะ การตอบสนองที่รวดเร็ว การบูรณาการที่ง่ายดาย และความน่าเชื่อถือที่ดีขึ้น ด้วยการลดความซับซ้อนของโครงสร้างแอคชูเอเตอร์ไปพร้อมๆ กับการเพิ่มประสิทธิภาพ เซอร์โวมอเตอร์แบบรวมช่วยให้ระบบหุ่นยนต์บรรลุประสิทธิภาพที่สูงขึ้นและความยืดหยุ่นมากขึ้น
สำหรับอุตสาหกรรมที่กำลังมองหาโซลูชันระบบอัตโนมัติขั้นสูง เซอร์โวมอเตอร์ในตัวเป็นวิธีที่มีประสิทธิภาพในการปรับปรุงประสิทธิภาพของมือจับหุ่นยนต์ และสนับสนุนการพัฒนาอย่างต่อเนื่องของการผลิตอัจฉริยะ
คุณสมบัติ |
เซอร์โวมอเตอร์ในตัว |
ระบบเซอร์โวแบบดั้งเดิม |
|---|---|---|
มอเตอร์และไดรเวอร์ |
บูรณาการ |
แยก |
การติดตั้ง |
เรียบง่าย |
ซับซ้อน |
สายไฟ |
ลดลง |
สายเพิ่มเติม |
ขนาด |
กะทัดรัด |
ใหญ่กว่า |
การซ่อมบำรุง |
ง่ายขึ้น |
ซับซ้อนมากขึ้น |
ความยืดหยุ่นของระบบ |
สูง |
ปานกลาง |
ความเหมาะสมของการประยุกต์ใช้ |
หุ่นยนต์ ระบบอัตโนมัติ อุปกรณ์ขนาดกะทัดรัด |
เครื่องจักรอุตสาหกรรมขนาดใหญ่ |
สำหรับการใช้งานมือจับหุ่นยนต์ที่พื้นที่ น้ำหนัก และความเร็วในการตอบสนองเป็นสิ่งสำคัญ เซอร์โวมอเตอร์ในตัวจะให้โซลูชันที่มีประสิทธิภาพมากกว่า
หุ่นยนต์อุตสาหกรรมที่ใช้ในการผลิตต้องการระบบจับยึดที่เชื่อถือได้สำหรับการทำงานซ้ำๆ
เซอร์โวมอเตอร์ในตัวช่วยให้มือจับแบบหุ่นยนต์บรรลุผล:
การวางตำแหน่งชิ้นส่วนที่แม่นยำ
แรงยึดเกาะที่มั่นคง
ความน่าเชื่อถือในการดำเนินงานในระยะยาว
การใช้งานทั่วไปได้แก่:
การผลิตยานยนต์
ประกอบอิเล็กทรอนิกส์
การแปรรูปโลหะ
การดูแลเครื่องจักร
หุ่นยนต์ร่วมปฏิบัติงานทำงานอย่างใกล้ชิดกับมนุษย์และต้องการการควบคุมการเคลื่อนไหวที่ปลอดภัยและชาญฉลาดยิ่งขึ้น
รองรับเซอร์โวมอเตอร์ในตัว:
การเคลื่อนไหวที่ราบรื่น
การปรับแรง
การออกแบบหุ่นยนต์ขนาดกะทัดรัด
เหมาะสำหรับ:
สายการผลิตที่ยืดหยุ่น
ระบบอัตโนมัติในห้องปฏิบัติการ
การผลิตชุดเล็ก
หุ่นยนต์คลังสินค้าอัตโนมัติมักต้องใช้มือจับเพื่อจัดการบรรจุภัณฑ์และผลิตภัณฑ์ที่แตกต่างกัน
โซลูชั่นเซอร์โวมอเตอร์ในตัวปรับปรุง:
ความแม่นยำในการเรียงลำดับ
ความเร็วในการจัดการ
ความน่าเชื่อถือของระบบ
สามารถใช้ใน:
ระบบหยิบสินค้าด้วยหุ่นยนต์
ระบบจัดเก็บข้อมูลอัตโนมัติ
อุปกรณ์คัดแยกอัจฉริยะ
ระบบอัตโนมัติทางการแพทย์จำเป็นต้องมีการเคลื่อนไหวที่แม่นยำอย่างยิ่ง
เซอร์โวมอเตอร์ในตัวให้:
ตำแหน่งที่แม่นยำ
การทำงานของการสั่นสะเทือนต่ำ
การควบคุมที่เชื่อถือได้
การใช้งานได้แก่:
การจัดการตัวอย่างในห้องปฏิบัติการ
การประกอบอุปกรณ์การแพทย์
แพลตฟอร์มระบบอัตโนมัติสำหรับการวิจัย
การเลือกสิ่งที่ถูกต้อง เซอร์โวมอเตอร์ในตัว สำหรับมือจับหุ่นยนต์ ถือเป็นสิ่งสำคัญในการจับที่แม่นยำ การทำงานที่มั่นคง และความน่าเชื่อถือในระยะยาว เซอร์โวมอเตอร์ที่เหมาะสมจะต้องตรงตามข้อกำหนดทางกลของมือจับ รวมถึงแรงบิด ความเร็ว ความแม่นยำ ขนาด วิธีการสื่อสาร และสภาพแวดล้อมในการทำงาน
ต่างจากระบบมอเตอร์แบบเดิมตรงที่ เซอร์โวมอเตอร์ในตัวจะรวมมอเตอร์ ไดรเวอร์ ตัวเข้ารหัส และอุปกรณ์อิเล็กทรอนิกส์ควบคุมไว้ในหน่วยเดียว ทำให้กระบวนการคัดเลือกมุ่งเน้นไปที่การจับคู่ประสิทธิภาพและความเข้ากันได้ของระบบมากขึ้น
ควรพิจารณาปัจจัยต่อไปนี้เมื่อเลือกเซอร์โวมอเตอร์ในตัวสำหรับการใช้งานมือจับหุ่นยนต์
ขั้นตอนแรกในการเลือกเซอร์โวมอเตอร์ในตัวคือการคำนวณแรงบิดที่ต้องการ
แรงบิดของมอเตอร์ส่งผลโดยตรงต่อแรงจับและความสามารถของมือจับหุ่นยนต์ในการยึดวัตถุอย่างแน่นหนา
ปัจจัยสำคัญได้แก่:
น้ำหนักของชิ้นงาน
โครงสร้างทางกลของกริปเปอร์
ค่าสัมประสิทธิ์แรงเสียดทานระหว่างนิ้วของมือจับกับวัตถุ
ประสิทธิภาพการส่งผ่าน
อัตรากำไรขั้นต้นด้านความปลอดภัย
มอเตอร์ที่มีแรงบิดไม่เพียงพออาจทำให้:
วัตถุลื่นไถล
การจับยึดไม่มั่นคง
ความแม่นยำของตำแหน่งลดลง
มอเตอร์ที่มีแรงบิดมากเกินไปอาจเพิ่มขึ้น:
ต้นทุนระบบ
การใช้พลังงาน
โหลดทางกล
การเลือกช่วงแรงบิดที่ถูกต้องทำให้มั่นใจทั้งประสิทธิภาพและประสิทธิภาพ
มือจับแบบหุ่นยนต์มักจะดำเนินการซ้ำๆ เช่น การหยิบ การวาง การประกอบ และการคัดแยก ดังนั้นความแม่นยำของการเคลื่อนไหวจึงเป็นปัจจัยในการเลือกที่สำคัญ
เซอร์โวมอเตอร์ในตัวพร้อมตัวเข้ารหัสความละเอียดสูงให้:
ข้อเสนอแนะตำแหน่งที่แม่นยำ
การควบคุมการเคลื่อนที่แบบวงปิด
การแก้ไขข้อผิดพลาดแบบเรียลไทม์
ปรับปรุงความสามารถในการทำซ้ำ
สำหรับการใช้งานเช่น:
การประกอบชิ้นส่วนอิเล็กทรอนิกส์
ระบบอัตโนมัติทางการแพทย์
การผลิตที่แม่นยำ
แนะนำให้ใช้ความละเอียดของตัวเข้ารหัสที่สูงขึ้นและประสิทธิภาพการควบคุมเซอร์โวที่ดีกว่า
มือจับหุ่นยนต์มักจะมีพื้นที่ในการติดตั้งจำกัด โดยเฉพาะอย่างยิ่งเมื่อติดตั้งที่ปลายแขนหุ่นยนต์
เซอร์โวมอเตอร์ในตัวที่เลือกควรคำนึงถึง:
เส้นผ่านศูนย์กลางมอเตอร์
ความยาวมอเตอร์
น้ำหนัก
วิธีการติดตั้ง
อินเตอร์เฟซทางกล
การออกแบบเซอร์โวมอเตอร์ขนาดกะทัดรัดช่วยให้บรรลุ:
หุ่นยนต์ปลายแขนหุ่นยนต์น้ำหนักเบา
การเคลื่อนไหวของหุ่นยนต์เร็วขึ้น
ความเฉื่อยต่ำ
บูรณาการทางกลได้ง่ายขึ้น
สำหรับหุ่นยนต์ร่วมปฏิบัติงานและอุปกรณ์อัตโนมัติขนาดกะทัดรัด การปรับขนาดให้เหมาะสมเป็นสิ่งสำคัญอย่างยิ่ง
การใช้งานมือจับหุ่นยนต์แต่ละแบบต้องใช้ความเร็วในการทำงานที่แตกต่างกัน
เมื่อเลือกเซอร์โวมอเตอร์ในตัว ให้ประเมิน:
ความเร็วในการเปิดและปิด
ข้อกำหนดการเร่งความเร็ว
รอบเวลา
ความถี่ในการทำงานต่อเนื่อง
การใช้งานความเร็วสูง เช่น การคัดแยกหรือบรรจุภัณฑ์อัตโนมัติ ต้องใช้เซอร์โวมอเตอร์ที่มี:
การตอบสนองที่รวดเร็ว
ความสามารถในการเร่งความเร็วสูง
การทำงานที่เสถียรที่โหลดแบบไดนามิก
ความสมดุลที่เหมาะสมระหว่างความเร็วและแรงบิดทำให้มั่นใจได้ถึงประสิทธิภาพของหุ่นยนต์
เซอร์โวมอเตอร์ในตัวจำเป็นต้องสื่อสารกับตัวควบคุมหุ่นยนต์หรือระบบอัตโนมัติ
ตัวเลือกการสื่อสารทั่วไป ได้แก่:
สามารถเปิดได้
อาร์เอส485
Modbus RTU
อีเธอร์แคท
การควบคุมชีพจรและทิศทาง
วิธีการสื่อสารควรตรงกับสถาปัตยกรรมการควบคุมหุ่นยนต์ที่มีอยู่
ตัวอย่างเช่น:
อุปกรณ์อัตโนมัติแบบธรรมดาอาจใช้การควบคุมพัลส์
ระบบหุ่นยนต์หลายแกนอาจต้องใช้การสื่อสาร EtherCAT
ระบบอัตโนมัติแบบกระจายอาจใช้เครือข่าย CANopen
การเลือกอินเทอร์เฟซที่ถูกต้องจะช่วยเพิ่มประสิทธิภาพในการบูรณาการและความเข้ากันได้ของระบบ
ตัวเข้ารหัสเป็นองค์ประกอบสำคัญที่กำหนดความแม่นยำของเซอร์โวมอเตอร์
ตัวเลือกตัวเข้ารหัสทั่วไป ได้แก่:
ตัวเข้ารหัสส่วนเพิ่ม
ตัวเข้ารหัสแม่เหล็ก
ตัวเข้ารหัสแสง
ตัวเข้ารหัสสัมบูรณ์
สำหรับมือจับแบบหุ่นยนต์ ตัวเข้ารหัสควรมี:
ข้อเสนอแนะตำแหน่งที่เชื่อถือได้
การดำเนินงานที่มั่นคง
การตอบสนองที่รวดเร็ว
ความละเอียดสูง
การใช้งานที่ต้องการการจับยึดและการวางตำแหน่งที่แม่นยำมักจะได้ประโยชน์จากระบบป้อนกลับที่มีประสิทธิภาพสูงกว่า
สภาพแวดล้อมการทำงานส่งผลโดยตรงต่อความน่าเชื่อถือของเซอร์โวมอเตอร์
พิจารณาเงื่อนไขเช่น:
ช่วงอุณหภูมิ
การสัมผัสฝุ่น
ความชื้น
การสั่นสะเทือน
ระยะเวลาดำเนินการต่อเนื่อง
สำหรับสภาพแวดล้อมทางอุตสาหกรรมที่รุนแรง ให้เลือกเซอร์โวมอเตอร์ในตัวที่มี:
การออกแบบการป้องกันที่แข็งแกร่ง
กระจายความร้อนได้ดีขึ้น
มีความทนทานสูงขึ้น
ตัวอย่างเช่น ระบบหุ่นยนต์ที่ใช้ในการแปรรูปอาหาร ระบบอัตโนมัติกลางแจ้ง หรือสายการผลิตทางอุตสาหกรรมอาจต้องการการปกป้องสิ่งแวดล้อมที่ดียิ่งขึ้น
ก่อนที่จะเลือกเซอร์โวมอเตอร์ในตัว ให้ยืนยันความเข้ากันได้กับแหล่งจ่ายไฟที่มีอยู่
ปัจจัยทั่วไป ได้แก่:
ระดับแรงดันไฟฟ้า
ข้อกำหนดในปัจจุบัน
การใช้พลังงาน
วิธีการเชื่อมต่อไฟฟ้า
แหล่งจ่ายไฟที่เหมาะสมช่วยให้แน่ใจว่า:
การทำงานของมอเตอร์มีความเสถียร
ลดความเสี่ยงจากความร้อนสูงเกินไป
อายุการใช้งานยาวนานขึ้น
ประเภทการรับน้ำหนักของมือจับหุ่นยนต์ส่งผลต่อการเลือกมอเตอร์
การใช้งานที่แตกต่างกันอาจเกี่ยวข้องกับ:
มอเตอร์ทำงานโดยใช้แรงที่ค่อนข้างคงที่
แรงยึดเกาะเปลี่ยนแปลงไปตามผลิตภัณฑ์ที่แตกต่างกัน
โครงสร้างมือจับหรือน้ำหนักบรรทุกจะสร้างความเฉื่อยเพิ่มเติม
สำหรับการใช้งานแบบแปรผันหรือความเฉื่อยสูง แนะนำให้เลือกเซอร์โวมอเตอร์ในตัวที่มีการตอบสนองแบบไดนามิกที่แข็งแกร่งและความสามารถในการปรับแรงบิด
นอกเหนือจากข้อกำหนดทางเทคนิคแล้ว ความสามารถของซัพพลายเออร์ยังส่งผลต่อประสิทธิภาพของระบบด้วย
ซัพพลายเออร์ที่เชื่อถือได้ควรจัดเตรียม:
ตัวเลือกการปรับแต่งมอเตอร์
การสนับสนุนด้านเทคนิค
คำแนะนำการสมัคร
การทดสอบผลิตภัณฑ์
ความสามารถในการให้บริการระยะยาว
สำหรับการใช้งานมือจับแบบหุ่นยนต์ อาจจำเป็นต้องมีการปรับแต่งสำหรับ:
ขนาดมอเตอร์
การออกแบบเพลาส่งออก
โปรโตคอลการสื่อสาร
ตัวเลือกตัวเข้ารหัส
โครงสร้างการติดตั้ง
กระบวนการคัดเลือกเชิงปฏิบัติประกอบด้วย:
แยกแยะ:
ประเภทกริปเปอร์
น้ำหนักบรรทุก
แรงจับยึดที่ต้องการ
ความเร็วในการทำงาน
กำหนด:
แรงบิดที่ต้องการ
ช่วงความเร็ว
ระดับพลังงาน
ข้อกำหนดด้านความแม่นยำ
ตรวจสอบ:
ขนาดมอเตอร์
แรงดันไฟฟ้า
วิธีการสื่อสาร
ความเข้ากันได้ในการติดตั้ง
ตรวจสอบ:
ความแม่นยำในการเคลื่อนไหว
ความเร็วในการตอบสนอง
ความสามารถในการโหลด
ความมั่นคงในระยะยาว
การเลือก ที่เหมาะสม สำหรับการใช้งานมือจับหุ่นยนต์ เซอร์โวมอเตอร์ในตัว จำเป็นต้องพิจารณาแรงบิด ความแม่นยำ ความเร็ว ขนาด การสื่อสาร ผลป้อนกลับ และสภาวะการทำงานอย่างรอบคอบ
เซอร์โวมอเตอร์ในตัวที่เลือกอย่างเหมาะสมสามารถให้:
การควบคุมการจับที่แม่นยำ
ประสิทธิภาพอัตโนมัติที่สูงขึ้น
ประสิทธิภาพของหุ่นยนต์ที่เชื่อถือได้
การรวมระบบที่ง่ายขึ้น
ด้วยการจับคู่ข้อมูลจำเพาะของมอเตอร์กับข้อกำหนดที่แท้จริงของมือจับหุ่นยนต์ ผู้ผลิตจึงสามารถสร้างระบบอัตโนมัติของหุ่นยนต์ที่ชาญฉลาด เร็วขึ้น และเชื่อถือได้มากขึ้น
ด้วยการเติบโตของอุตสาหกรรม 4.0 และระบบอัตโนมัติอัจฉริยะ เซอร์โวมอเตอร์แบบรวม จะยังคงพัฒนาไปสู่ความฉลาดและประสิทธิภาพที่สูงขึ้น
แนวโน้มในอนาคต ได้แก่ :
ปัญญาประดิษฐ์และอัลกอริธึมขั้นสูงจะช่วยให้หุ่นยนต์ปรับกลยุทธ์การจับให้เหมาะสมโดยอัตโนมัติ โดยยึดตามการจดจำวัตถุและการตอบรับแบบเรียลไทม์
เซอร์โวมอเตอร์จะยังคงมีขนาดเล็กลงในขณะที่ให้แรงบิดที่สูงกว่า
เทคโนโลยีมอเตอร์ขั้นสูงจะช่วยลดการใช้พลังงานและปรับปรุงประสิทธิภาพการทำงาน
เซอร์โวมอเตอร์ในตัวจะเชื่อมต่อกันมากขึ้นผ่านเครือข่ายการสื่อสารทางอุตสาหกรรม ซึ่งสนับสนุนระบบโรงงานอัจฉริยะ
เซอร์ โวมอเตอร์ในตัวสำหรับมือจับแบบหุ่นยนต์ ให้การผสมผสานอันทรงพลังของโครงสร้างที่กะทัดรัด การควบคุมที่แม่นยำ การป้อนกลับอัจฉริยะ และการบูรณาการระบบที่ง่ายขึ้น
ด้วยการรวมมอเตอร์ ไดรเวอร์ และตัวเข้ารหัสไว้ในโซลูชันเดียว เทคโนโลยีเซอร์โวแบบรวมช่วยให้ระบบหุ่นยนต์บรรลุประสิทธิภาพที่สูงขึ้นในขณะที่ลดความซับซ้อน
สำหรับอุตสาหกรรมระบบอัตโนมัติสมัยใหม่ที่ต้องการโซลูชันการจับยึดที่รวดเร็ว แม่นยำ และเชื่อถือได้ เซอร์โวมอเตอร์แบบรวมกำลังกลายเป็นเทคโนโลยีควบคุมการเคลื่อนไหวที่จำเป็นซึ่งสนับสนุนหุ่นยนต์อัจฉริยะรุ่นต่อไป
คำตอบของ BESFOC:
เซอร์ โวมอเตอร์ในตัวสำหรับมือจับหุ่นยนต์ เป็นโซลูชันควบคุมการเคลื่อนไหวขนาดกะทัดรัดที่รวมมอเตอร์ เซอร์โวไดรฟ์ ตัวเข้ารหัส และอุปกรณ์อิเล็กทรอนิกส์ควบคุมไว้ในหน่วยเดียว เซอร์โวมอเตอร์แบบรวมของ BESFOC ได้รับการออกแบบมาเพื่อให้การควบคุมตำแหน่งที่แม่นยำ แรงบิดที่เสถียร และการตอบสนองที่รวดเร็วสำหรับการใช้งานมือจับแบบหุ่นยนต์ เมื่อเปรียบเทียบกับระบบเซอร์โวแบบเดิม จะช่วยลดความซับซ้อนในการเดินสายไฟ ประหยัดพื้นที่ในการติดตั้ง และปรับปรุงความน่าเชื่อถือของระบบโดยรวม
คำตอบของ BESFOC:
เซอร์โวมอเตอร์ในตัวของ BESFOC มีข้อดีหลายประการสำหรับมือจับแบบหุ่นยนต์ รวมถึง ความแม่นยำสูง การออกแบบที่กะทัดรัด การควบคุมอัจฉริยะ และการบูรณาการที่ ง่ายดาย ตัวเข้ารหัสในตัวช่วยให้สามารถควบคุมวงปิดเพื่อการวางตำแหน่งที่แม่นยำและการทำงานซ้ำได้ โครงสร้างแบบรวมช่วยลดส่วนประกอบภายนอกและสายไฟ ทำให้ระบบหุ่นยนต์มีขนาดกะทัดรัด มีประสิทธิภาพ และบำรุงรักษาได้ง่ายขึ้น
คำตอบของ BESFOC:
เซอร์โวมอเตอร์ในตัวช่วยปรับปรุงประสิทธิภาพของมือจับหุ่นยนต์โดยให้การควบคุมการเคลื่อนไหวที่แม่นยำ แรงจับที่ปรับได้ และการตอบสนองแบบไดนามิกที่รวดเร็ว เซอร์โวมอเตอร์ BESFOC สามารถควบคุมความเร็ว ตำแหน่ง และแรงบิดได้อย่างแม่นยำ ช่วยให้มือจับหุ่นยนต์สามารถจัดการกับวัตถุต่างๆ ได้อย่างปลอดภัยและมีประสิทธิภาพ ทำให้เหมาะสำหรับการใช้งานต่างๆ เช่น หุ่นยนต์อุตสาหกรรม หุ่นยนต์ร่วมปฏิบัติงาน การประกอบอัตโนมัติ และระบบการผลิตอัจฉริยะ
คำตอบของ BESFOC:
เซอร์โวมอเตอร์แบบรวมของ BESFOC ถูกนำมาใช้กันอย่างแพร่หลายในการใช้งานมือจับหุ่นยนต์ต่างๆ รวมถึง ระบบอัตโนมัติทางอุตสาหกรรม แขนหุ่นยนต์ หุ่นยนต์ร่วมปฏิบัติงาน อุปกรณ์การผลิตอัจฉริยะ ระบบอัตโนมัติในคลังสินค้า และระบบการประกอบที่มีความ แม่นยำ ขนาดกะทัดรัดและประสิทธิภาพการควบคุมที่เชื่อถือได้ ทำให้เหมาะสำหรับการใช้งานที่ต้องการการจับที่แม่นยำ การวางตำแหน่ง และการเคลื่อนไหวซ้ำๆ
คำตอบของ BESFOC:
เมื่อเลือกเซอร์โวมอเตอร์ในตัวสำหรับมือจับหุ่นยนต์ ปัจจัยสำคัญ ได้แก่ แรงบิด ความเร็ว ความแม่นยำของตำแหน่ง ขนาดมอเตอร์ วิธีการสื่อสาร และสภาพแวดล้อมการทำงานที่ต้องการ BESFOC นำเสนอโซลูชันเซอร์โวมอเตอร์แบบครบวงจรและตัวเลือกการปรับแต่งต่างๆ เพื่อตอบสนองความต้องการใช้งานหุ่นยนต์เฉพาะ ช่วยให้ลูกค้าควบคุมการเคลื่อนไหวที่เชื่อถือได้และมีประสิทธิภาพ





















































