
Wyświetlenia: 0 Autor: Edytor witryny Czas publikacji: 30.06.2026 Pochodzenie: Strona

Zintegrowane serwomotory BESFOC do chwytaków robotycznych zapewniają kompaktowe, precyzyjne i inteligentne rozwiązania w zakresie sterowania ruchem. Dzięki zintegrowanym systemom napędu i sprzężenia zwrotnego poprawiają dokładność, wydajność i niezawodność chwytania robotów w zastosowaniach automatyki przemysłowej.
Szybki rozwój automatyki przemysłowej, robotów współpracujących i inteligentnej produkcji zwiększył zapotrzebowanie na bardziej kompaktowe, precyzyjne i wydajne rozwiązania w zakresie sterowania ruchem. Wśród kluczowych komponentów determinujących wydajność robota, system siłowników chwytaka robota odgrywa zasadniczą rolę w zapewnianiu dokładnej obsługi obiektu, niezawodnej siły chwytania i elastycznej automatyzacji.
Tradycyjne systemy chwytaków robotycznych zwykle wymagają oddzielnych silników, sterowników, sterowników i skomplikowanych systemów okablowania. Struktura ta zwiększa trudność instalacji, zmniejsza niezawodność systemu i ogranicza elastyczność projektów robotycznych. Pojawienie się zintegrowanego serwosilnika do chwytaków robotycznych zapewnia nowe rozwiązanie poprzez połączenie silnika, sterownika, enkodera i elektroniki sterującej w jedną kompaktową jednostkę.
Zintegrowany silnik serwo umożliwia chwytakom robotów osiągnięcie wysokiej precyzji pozycjonowania, kontroli sprzężenia zwrotnego w czasie rzeczywistym, szybkiej reakcji i uproszczonej konstrukcji mechanicznej , dzięki czemu jest szeroko stosowany w robotach przemysłowych, robotach współpracujących (cobotach), zautomatyzowanych systemach montażu, inteligentnej logistyce i precyzyjnym sprzęcie produkcyjnym.
Jakiś zintegrowany serwomotor to urządzenie sterujące ruchem, które integruje wiele komponentów w jeden kompaktowy zespół, w tym:
Bezszczotkowy silnik serwo prądu stałego lub silnik serwo
Elektronika serwonapędu
Koder o wysokiej rozdzielczości
Interfejs kontrolera ruchu
System komunikacji
Algorytm sterowania położeniem i prędkością
Po zastosowaniu w chwytaku robota zintegrowany serwomotor bezpośrednio steruje otwieraniem, zamykaniem, siłą chwytania i dokładnością pozycjonowania mechanizmu chwytaka.
W porównaniu z konwencjonalnymi systemami serwo, które wymagają zewnętrznych serwonapędów i dodatkowego okablowania, zintegrowany serwosilnik zapewnia bardziej zwartą i wydajną architekturę.
Silnik może odbierać polecenia ze sterownika robota i automatycznie regulować moment obrotowy, prędkość i położenie zgodnie z sygnałami zwrotnymi z enkodera. Dzięki temu zrobotyzowane chwytaki mogą obsługiwać różne przedmioty z większą dokładnością i stabilnością.

|
|

|

|

|
|
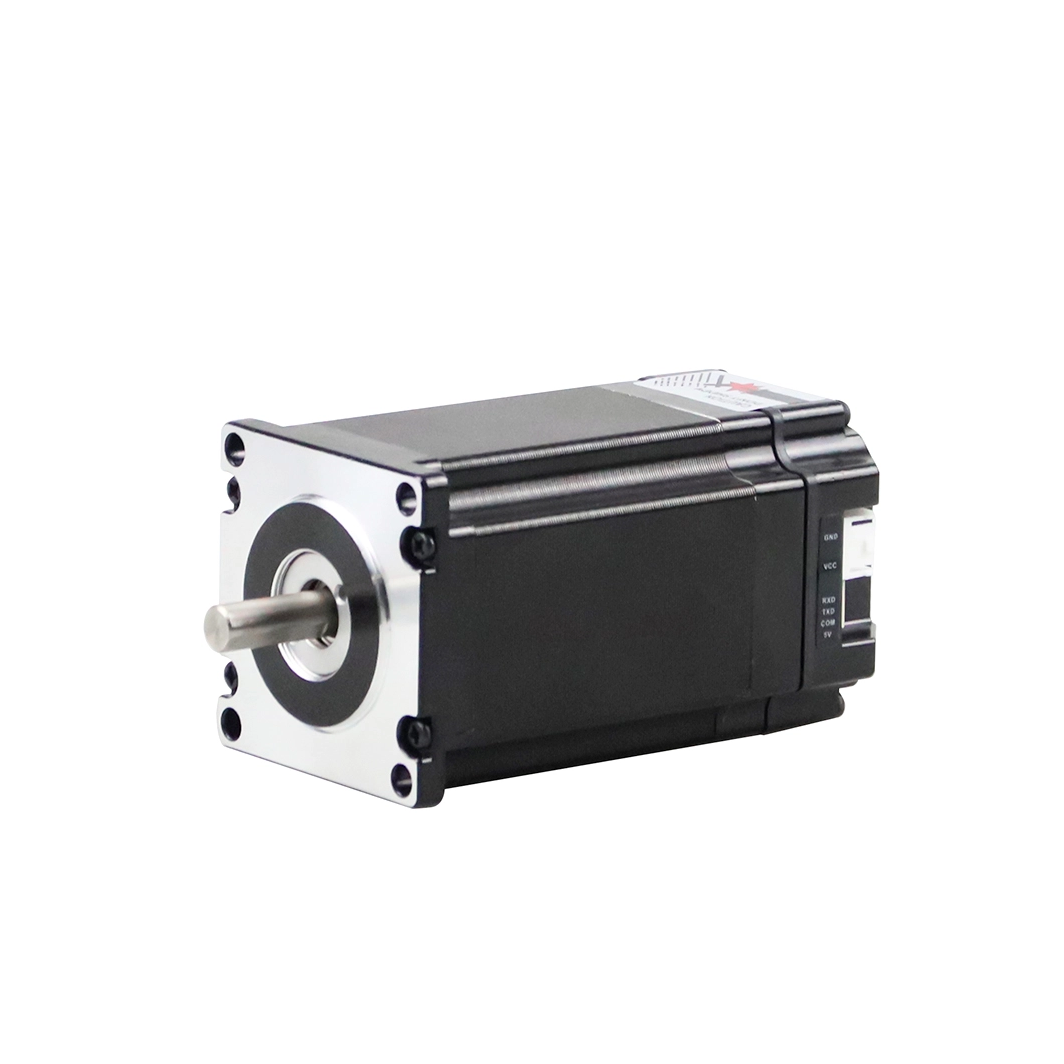
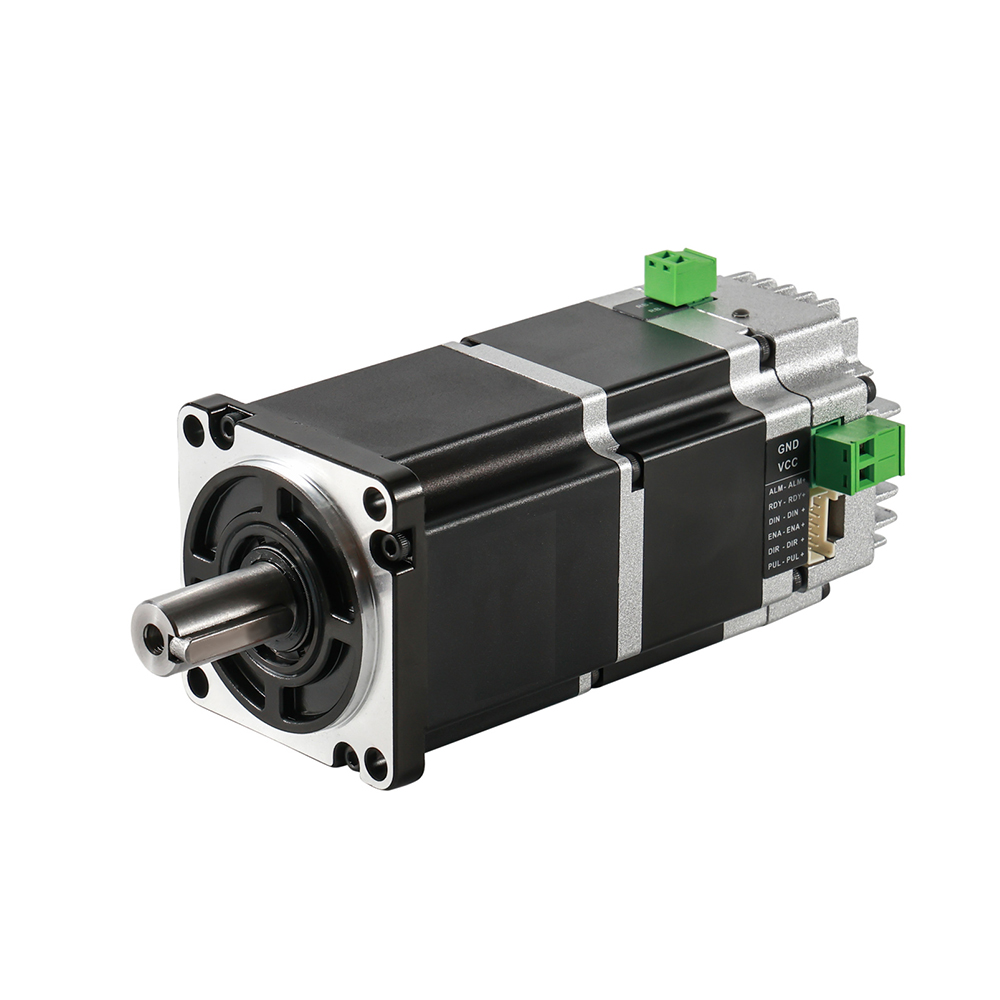
Zintegrowany serwosilnik krokowy |
Zintegrowany serwosilnik krokowy |
Zintegrowany serwosilnik BLDC |
Zintegrowany serwosilnik BLDC |
Zintegrowany serwosilnik BLDC |
Zintegrowany serwosilnik BLDC |

|

|

|

|

|
|---|---|---|---|---|
Wał |
Obudowa terminala |
Przekładnia ślimakowa |
Przekładnia planetarna |
Śruba pociągowa |

|

|

|

|

|
Ruch liniowy |
Śruba kulowa |
Hamulec |
Poziom IP |

|

|

|

|

|

|
|---|---|---|---|---|---|
Aluminiowe koło pasowe |
Sworzeń wału |
Pojedynczy wał D |
Wał pusty |
Plastikowe koło pasowe |
Bieg |

|

|

|

|

|

|
Radełkowanie |
Wał hobbujący |
Wał śrubowy |
Wał pusty |
Wał podwójnego D |
Klucz |
Do przenoszenia produktów o różnych rozmiarach, kształtach i materiałach często wymagane są chwytaki robotyczne. Niezależnie od tego, czy pobierasz komponenty elektroniczne, części samochodowe, urządzenia medyczne czy produkty opakowaniowe, chwytak musi precyzyjnie kontrolować ruch.
Zintegrowany silnik serwo zapewnia:
Wysoka dokładność pozycjonowania
Sterowanie w pętli zamkniętej
Korekcja błędów w czasie rzeczywistym
Stabilna powtarzalność
Wbudowany enkoder stale monitoruje położenie silnika i wysyła sygnały zwrotne do układu sterowania. Jeśli wystąpi jakiekolwiek odchylenie pozycji, serwomechanizm automatycznie kompensuje, aby utrzymać dokładny ruch.
Jest to szczególnie ważne w zastosowaniach wymagających precyzji na poziomie mikrona lub milimetra, takich jak montaż półprzewodników i precyzyjne systemy kontroli.
Nowoczesne roboty stają się coraz mniejsze, lżejsze i bardziej inteligentne. Tradycyjne układy silnikowe często wymagają:
Zewnętrzne serwonapędy
Duże szafy sterownicze
Skomplikowane okablowanie
Dodatkowe złącza
Komponenty te zwiększają przestrzeń instalacyjną i koszty konserwacji.
The zintegrowany serwosilnik do zastosowań w chwytakach robotycznych zmniejsza złożoność systemu poprzez połączenie napędu i silnika w jeden pakiet.
Korzyści obejmują:
Zmniejszona waga ramienia robota
Mniejsza konstrukcja mechaniczna
Łatwiejsza instalacja
Niższe wymagania dotyczące okablowania
Większa niezawodność systemu
W przypadku zrobotyzowanych efektorów końcowych, gdzie dostępna przestrzeń jest ograniczona, kompaktowe zintegrowane rozwiązania serwo zapewniają znaczne korzyści.
Głównym wyzwaniem dla chwytaków robotycznych jest kontrolowanie prawidłowej siły chwytania.
Zbyt duża siła może uszkodzić delikatne produkty, natomiast niewystarczająca siła może spowodować poślizg przedmiotów.
Zintegrowane serwomotory obsługują inteligentną kontrolę momentu obrotowego, umożliwiając robotom chwytającym dostosowywanie siły zgodnie z wymaganiami aplikacji.
Na przykład:
Manipulowanie produktami szklanymi wymaga delikatnego chwytania
Elementy samochodowe wymagają większej siły trzymania
Sprzęt medyczny wymaga precyzyjnego i stabilnego ruchu
Dzięki kontroli momentu obrotowego w zamkniętej pętli zintegrowany serwomotor może utrzymać stały nacisk chwytania i poprawić jakość produktu.
W środowiskach produkcyjnych charakteryzujących się dużą szybkością systemy zrobotyzowane muszą szybko i dokładnie wykonywać powtarzalne operacje.
Zintegrowane serwomotory zapewniają:
Szybkie przyspieszanie i zwalnianie
Wysoka dynamika reakcji
Płynna kontrola ruchu
Zmniejszone opóźnienia operacyjne
W przypadku zautomatyzowanych linii montażowych szybsza reakcja chwytaka bezpośrednio poprawia wydajność produkcji.
Aplikacje takie jak:
Roboty typu pick-and-place
Roboty pakujące
Systemy sortowania
Roboty montażowe
Skorzystaj z charakterystyki szybkiego reagowania zintegrowanej technologii serwo.
Przyjęcie zintegrowane serwomotory w zastosowaniach zrobotyzowanych chwytaków zapewniają znaczną poprawę kontroli ruchu, wydajności systemu i wydajności automatyzacji. Łącząc silnik, serwonapęd, enkoder i elektronikę sterującą w jedną kompaktową jednostkę, zintegrowane rozwiązania serwo stanowią bardziej elastyczną i niezawodną alternatywę dla tradycyjnych układów silników.
Jedną z największych zalet zintegrowanego serwosilnika do chwytaków robotycznych jest jego zwarta konstrukcja. Tradycyjne systemy serwo zwykle wymagają oddzielnych silników, napędów, sterowników i skomplikowanego okablowania, co zwiększa przestrzeń instalacyjną i złożoność systemu.
Zintegrowane serwosilniki łączą wiele komponentów w jedną jednostkę, pomagając producentom robotów osiągnąć:
Zmniejszony rozmiar siłownika
Mniejsza waga ramienia robota
Uproszczona konstrukcja mechaniczna
Łatwiejsza instalacja w ograniczonych przestrzeniach
Ta kompaktowa konstrukcja jest szczególnie cenna w przypadku robotów współpracujących, lekkich ramion robotycznych i systemów narzędzi na końcu ramienia , gdzie przestrzeń i waga są czynnikami krytycznymi.
Chwytaki robotyczne wymagają dokładnego pozycjonowania, aby podnosić, umieszczać i montować różne przedmioty. Zintegrowane serwosilniki zapewniają sterowanie w pętli zamkniętej za pomocą wbudowanych enkoderów, umożliwiając monitorowanie w czasie rzeczywistym i korektę położenia silnika.
Kluczowe korzyści obejmują:
Wysoka dokładność pozycjonowania
Poprawiona powtarzalność
Redukcja błędów pozycjonowania
Stabilna wydajność chwytania
W porównaniu z rozwiązaniami silników z otwartą pętlą, zintegrowane serwomotory mogą automatycznie kompensować zmiany obciążenia i zakłócenia zewnętrzne, zapewniając bardziej niezawodne działanie robotów.
Różne produkty wymagają różnych sił chwytania. Delikatne elementy wymagają delikatnego obchodzenia się, natomiast cięższe części wymagają większej siły trzymania.
Zintegrowane serwomotory zapewniają precyzyjną kontrolę momentu obrotowego, umożliwiając robotom chwytającym dostosowanie siły chwytania zgodnie z wymaganiami aplikacji.
Dzięki temu roboty mogą bezpiecznie obsługiwać:
Elementy elektroniczne
Wyroby szklane
Urządzenia medyczne
Części samochodowe
Materiały opakowaniowe
Dokładna kontrola siły pomaga zmniejszyć uszkodzenia produktu i poprawia spójność produkcji.
Nowoczesne systemy automatyki wymagają od robotów szybkiego wykonywania zadań przy zachowaniu dokładności. Zintegrowane serwomotory oferują doskonałą dynamikę z szybkim przyspieszaniem, zwalnianiem i szybkością reakcji.
Zalety obejmują:
Krótsze cykle operacyjne
Szybsze chwytanie i zwalnianie
Płynne przejścia ruchu
Poprawiona wydajność produkcji
W przypadku zastosowań wymagających dużej prędkości, takich jak zautomatyzowane linie montażowe, systemy sortowania i zrobotyzowane urządzenia do kompletacji , szybsza reakcja silnika bezpośrednio poprawia ogólną produktywność.
Tradycyjne systemy serwo często wymagają skomplikowanego okablowania pomiędzy silnikami, napędami, sterownikami i urządzeniami sprzężenia zwrotnego. Wydłuża to czas instalacji i utrudnia konserwację.
Zintegrowane serwosilniki upraszczają architekturę systemu, redukując:
Kable zasilające
Kable enkodera
Podłączenia napędu zewnętrznego
Wymagania dotyczące szafy sterowniczej
Dzięki interfejsom komunikacyjnym, takim jak CANopen, RS485, Modbus lub EtherCAT , zintegrowane serwomotory można łatwo połączyć z robotami przemysłowymi i sterownikami automatyki.
Kluczowe zalety zintegrowanych serwomotorów do zastosowań w chwytakach robotycznych obejmują kompaktową konstrukcję, precyzyjne sterowanie ruchem, inteligentne zarządzanie siłą, szybką reakcję, łatwą integrację i zwiększoną niezawodność. Upraszczając konstrukcję siłownika przy jednoczesnym zwiększeniu wydajności, zintegrowane serwomotory pomagają systemom robotycznym osiągnąć wyższą wydajność i większą elastyczność.
Dla branż poszukujących zaawansowanych rozwiązań w zakresie automatyzacji zintegrowane serwosilniki stanowią skuteczny sposób na poprawę wydajności chwytaków robotycznych i wspieranie ciągłego rozwoju inteligentnej produkcji.
Funkcja |
Zintegrowany silnik serwo |
Tradycyjny system serwo |
|---|---|---|
Silnik i kierowca |
Zintegrowany |
Oddzielny |
Instalacja |
Prosty |
Złożony |
Okablowanie |
Zmniejszony |
Więcej kabli |
Rozmiar |
Kompaktowy |
Większy |
Konserwacja |
Łatwiejsze |
Bardziej skomplikowane |
Elastyczność systemu |
Wysoki |
Umiarkowany |
Przydatność aplikacji |
Robotyka, automatyka, sprzęt kompaktowy |
Duże maszyny przemysłowe |
W przypadku zastosowań zrobotyzowanych chwytaków, w których przestrzeń, waga i szybkość reakcji mają kluczowe znaczenie, zintegrowane serwomotory stanowią bardziej wydajne rozwiązanie.
Roboty przemysłowe stosowane w produkcji wymagają niezawodnych systemów chwytających do powtarzalnych operacji.
Zintegrowane serwomotory pomagają robotycznym chwytakom osiągnąć:
Dokładne pozycjonowanie części
Stabilna siła chwytu
Długoterminowa niezawodność działania
Typowe zastosowania obejmują:
Produkcja samochodów
Montaż elektroniki
Obróbka metali
Opieka nad maszynami
Roboty współpracujące ściśle współpracują z ludźmi i wymagają bezpieczniejszego, bardziej inteligentnego sterowania ruchem.
Zintegrowane serwomotory obsługują:
Płynny ruch
Regulacja siły
Kompaktowa konstrukcja robota
Nadają się do:
Elastyczne linie produkcyjne
Automatyka laboratoryjna
Produkcja małoseryjna
Zautomatyzowane roboty magazynowe często wymagają chwytaków do obsługi różnych opakowań i produktów.
Zintegrowane rozwiązania w zakresie silników serwo poprawiają:
Dokładność sortowania
Szybkość obsługi
Niezawodność systemu
Można je stosować w:
Zrobotyzowane systemy kompletacji
Zautomatyzowane systemy magazynowania
Inteligentne urządzenia sortujące
Automatyka medyczna wymaga niezwykle precyzyjnego ruchu.
Zintegrowane serwomotory zapewniają:
Dokładne pozycjonowanie
Praca przy niskim poziomie wibracji
Niezawodna kontrola
Zastosowania obejmują:
Postępowanie z próbkami laboratoryjnymi
Montaż urządzenia medycznego
Platformy automatyzacji badań
Wybór prawa zintegrowany serwomotor chwytaka robota jest niezbędny do osiągnięcia dokładnego chwytania, stabilnej pracy i długoterminowej niezawodności. Odpowiedni silnik serwo musi spełniać wymagania mechaniczne chwytaka, w tym moment obrotowy, prędkość, precyzję, rozmiar, metodę komunikacji i środowisko pracy.
W przeciwieństwie do tradycyjnych systemów silników, zintegrowany serwomotor łączy silnik, sterownik, enkoder i elektronikę sterującą w jedną kompaktową jednostkę , dzięki czemu proces selekcji jest bardziej skupiony na dopasowaniu wydajności i kompatybilności systemu.
Przy wyborze zintegrowanego serwosilnika do zastosowań w chwytakach robotycznych należy wziąć pod uwagę następujące czynniki.
Pierwszym krokiem przy wyborze zintegrowanego serwosilnika jest obliczenie wymaganego momentu obrotowego.
Moment obrotowy silnika wpływa bezpośrednio na siłę chwytania i zdolność chwytaka robota do bezpiecznego trzymania przedmiotów.
Ważne czynniki obejmują:
Masa przedmiotu obrabianego
Konstrukcja mechaniczna chwytaka
Współczynnik tarcia pomiędzy palcami chwytaka a przedmiotem
Wydajność transmisji
Margines bezpieczeństwa
Silnik o niewystarczającym momencie obrotowym może powodować:
Poślizg obiektu
Niestabilny chwyt
Zmniejszona dokładność pozycjonowania
Silnik z nadmiernym momentem obrotowym może zwiększyć:
Koszt systemu
Zużycie energii
Obciążenie mechaniczne
Wybór prawidłowego zakresu momentu obrotowego zapewnia zarówno wydajność, jak i efektywność.
Chwytaki robotyczne często wykonują powtarzalne operacje, takie jak pobieranie, umieszczanie, składanie i sortowanie. Dlatego dokładność ruchu jest krytycznym czynnikiem wyboru.
Zintegrowany serwomotor z enkoderem o wysokiej rozdzielczości zapewnia:
Dokładne informacje zwrotne o położeniu
Sterowanie ruchem w pętli zamkniętej
Korekcja błędów w czasie rzeczywistym
Poprawiona powtarzalność
Do zastosowań takich jak:
Montaż podzespołów elektronicznych
Automatyka medyczna
Precyzyjna produkcja
zaleca się wyższą rozdzielczość enkodera i lepszą wydajność sterowania serwomechanizmem.
Chwytaki robotyczne mają zwykle ograniczoną przestrzeń instalacyjną, szczególnie gdy są montowane na końcu ramienia robota.
Wybrany zintegrowany serwomotor powinien uwzględniać:
Średnica silnika
Długość silnika
Waga
Sposób montażu
Interfejs mechaniczny
Kompaktowa konstrukcja serwomotoru pomaga osiągnąć:
Lekkie robotyczne efektory końcowe
Szybszy ruch robota
Niższa bezwładność
Łatwiejsza integracja mechaniczna
W przypadku robotów współpracujących i kompaktowych urządzeń automatyki optymalizacja rozmiaru jest szczególnie ważna.
Różne zastosowania chwytaków robotycznych wymagają różnych prędkości roboczych.
Wybierając zintegrowany serwomotor, należy wziąć pod uwagę:
Prędkość otwierania i zamykania
Wymagania dotyczące przyspieszenia
Czas cyklu
Ciągła częstotliwość robocza
Zastosowania wymagające dużej prędkości, takie jak automatyczne sortowanie lub pakowanie, wymagają serwomotorów wyposażonych w:
Szybka reakcja
Wysoka zdolność przyspieszania
Stabilna praca przy obciążeniach dynamicznych
Właściwa równowaga pomiędzy prędkością i momentem obrotowym zapewnia wydajną pracę robota.
Zintegrowane serwosilniki muszą komunikować się ze sterownikiem robota lub systemem automatyki.
Typowe opcje komunikacji obejmują:
CANopen
RS485
Modbus RTU
EtherCAT
Sterowanie impulsem i kierunkiem
Metoda komunikacji powinna pasować do istniejącej architektury sterowania robotycznego.
Na przykład:
Proste urządzenia automatyki mogą wykorzystywać sterowanie impulsowe
Wieloosiowe systemy robotyczne mogą wymagać komunikacji EtherCAT
Rozproszone systemy automatyki mogą wykorzystywać sieci CANopen
Wybór odpowiedniego interfejsu poprawia efektywność integracji i kompatybilność systemu.
Enkoder jest kluczowym elementem określającym dokładność serwomotoru.
Typowe opcje kodera obejmują:
Enkoder przyrostowy
Enkoder magnetyczny
Enkoder optyczny
Enkoder absolutny
W przypadku chwytaków robotycznych koder powinien zapewniać:
Niezawodny sygnał zwrotny pozycji
Stabilna praca
Szybka reakcja
Wysoka rozdzielczość
Zastosowania wymagające precyzyjnego chwytania i pozycjonowania zwykle korzystają z systemów sprzężenia zwrotnego o wyższej wydajności.
Środowisko pracy ma bezpośredni wpływ na niezawodność serwomotoru.
Weź pod uwagę takie warunki jak:
Zakres temperatur
Narażenie na kurz
Wilgotność
Wibracja
Ciągły czas pracy
Do trudnych warunków przemysłowych wybierz zintegrowane serwomotory z:
Mocna konstrukcja zabezpieczająca
Lepsze odprowadzanie ciepła
Większa trwałość
Na przykład systemy robotyczne stosowane w przetwórstwie żywności, automatyce zewnętrznej lub przemysłowych liniach produkcyjnych mogą wymagać zwiększonej ochrony środowiska.
Przed wyborem zintegrowanego serwomotoru należy sprawdzić kompatybilność z dostępnym zasilaczem.
Typowe czynniki obejmują:
Napięcie znamionowe
Aktualne wymagania
Zużycie energii
Sposób podłączenia elektrycznego
Odpowiedni zasilacz zapewnia:
Stabilna praca silnika
Zmniejszone ryzyko przegrzania
Dłuższa żywotność
Rodzaj obciążenia chwytaka robota wpływa na wybór silnika.
Różne zastosowania mogą obejmować:
Silnik pracuje przy stosunkowo stabilnym zapotrzebowaniu na siłę.
Siła chwytania zmienia się w zależności od różnych produktów.
Konstrukcja chwytaka lub ładunek stwarza dodatkową bezwładność.
W przypadku zastosowań o zmiennej lub dużej bezwładności zaleca się wybór zintegrowanego serwomotoru o dużej reakcji dynamicznej i możliwości regulacji momentu obrotowego.
Poza specyfikacjami technicznymi, możliwości dostawcy wpływają również na wydajność systemu.
Rzetelny dostawca powinien zapewniać:
Opcje dostosowywania silnika
Wsparcie techniczne
Wskazówki dotyczące stosowania
Testowanie produktu
Długoterminowa zdolność serwisowa
W przypadku zastosowań chwytaków robotycznych dostosowanie może być wymagane w przypadku:
Wymiary silnika
Konstrukcja wału wyjściowego
Protokoły komunikacyjne
Opcje kodera
Konstrukcje montażowe
Praktyczny proces selekcji obejmuje:
Zidentyfikować:
Typ chwytaka
Masa ładunku
Wymagana siła chwytania
Prędkość robocza
Określić:
Wymagany moment obrotowy
Zakres prędkości
Moc znamionowa
Wymagania dotyczące dokładności
Sprawdzać:
Rozmiar silnika
Woltaż
Metoda komunikacji
Kompatybilność instalacji
Zweryfikować:
Dokładność ruchu
Szybkość reakcji
Możliwość obciążenia
Długoterminowa stabilność
Wybór odpowiedniego zintegrowanego serwomotoru do zastosowań w chwytakach robotycznych wymaga dokładnego rozważenia momentu obrotowego, dokładności, prędkości, rozmiaru, komunikacji, sprzężenia zwrotnego i warunków pracy.
Odpowiednio dobrany zintegrowany serwomotor może zapewnić:
Precyzyjna kontrola chwytu
Wyższa wydajność automatyzacji
Niezawodna wydajność robota
Uproszczona integracja systemu
Dopasowując specyfikacje silnika do rzeczywistych wymagań chwytaka robota, producenci mogą budować inteligentniejsze, szybsze i bardziej niezawodne zrobotyzowane systemy automatyzacji.
Wraz z rozwojem Przemysłu 4.0 i inteligentnej automatyzacji, zintegrowane serwomotory będą nadal ewoluować w kierunku wyższej inteligencji i wydajności.
Przyszłe trendy obejmują:
Sztuczna inteligencja i zaawansowane algorytmy umożliwią robotom automatyczną optymalizację strategii chwytania w oparciu o rozpoznawanie obiektów i informacje zwrotne w czasie rzeczywistym.
Serwosilniki będą w dalszym ciągu zmniejszać się, zapewniając jednocześnie wyższy moment obrotowy.
Zaawansowana technologia silnika zmniejszy zużycie energii i poprawi wydajność roboczą.
Zintegrowane serwosilniki staną się bardziej połączone za pośrednictwem przemysłowych sieci komunikacyjnych, wspierając inteligentne systemy fabryczne.
Zintegrowany silnik serwo do chwytaków robotycznych zapewnia wydajne połączenie zwartej konstrukcji, precyzyjnego sterowania, inteligentnego sprzężenia zwrotnego i uproszczonej integracji systemu.
Łącząc silnik, sterownik i enkoder w jedno rozwiązanie, zintegrowana technologia serwo pomaga systemom robotycznym osiągnąć wyższą wydajność przy jednoczesnym zmniejszeniu złożoności.
W nowoczesnych branżach automatyki wymagających szybkich, dokładnych i niezawodnych rozwiązań chwytających zintegrowane serwomotory stają się niezbędną technologią sterowania ruchem, która wspiera następną generację inteligentnej robotyki.
Odpowiedź BESFOC:
Zintegrowany serwomotor do chwytaka robota to kompaktowe rozwiązanie do sterowania ruchem, które łączy silnik, serwonapęd, enkoder i elektronikę sterującą w jedną jednostkę. Zintegrowane serwosilniki BESFOC zostały zaprojektowane w celu zapewnienia precyzyjnej kontroli położenia, stabilnego wyjściowego momentu obrotowego i szybkiej reakcji w zastosowaniach z chwytakami robotów. W porównaniu z tradycyjnymi systemami serwo zmniejszają złożoność okablowania, oszczędzają przestrzeń instalacyjną i poprawiają ogólną niezawodność systemu.
Odpowiedź BESFOC:
Zintegrowane serwomotory BESFOC oferują szereg korzyści dla chwytaków robotycznych, w tym wysoką precyzję, kompaktową konstrukcję, inteligentne sterowanie i łatwą integrację . Wbudowany enkoder umożliwia sterowanie w pętli zamkniętej w celu dokładnego pozycjonowania i powtarzalnej pracy. Zintegrowana struktura ogranicza liczbę elementów zewnętrznych i okablowania, dzięki czemu system robotyczny jest bardziej kompaktowy, wydajny i łatwiejszy w utrzymaniu.
Odpowiedź BESFOC:
Zintegrowany serwomotor poprawia wydajność chwytaka robota, zapewniając dokładną kontrolę ruchu, regulowaną siłę chwytania i szybką reakcję dynamiczną. Serwosilniki BESFOC mogą precyzyjnie kontrolować prędkość, położenie i moment obrotowy, umożliwiając robotycznym chwytakom bezpieczne i wydajne manipulowanie różnymi przedmiotami. Dzięki temu nadają się do zastosowań takich jak roboty przemysłowe, roboty współpracujące, zautomatyzowany montaż i inteligentne systemy produkcyjne.
Odpowiedź BESFOC:
Zintegrowane serwomotory BESFOC są szeroko stosowane w różnych zastosowaniach chwytaków robotycznych, w tym w automatyce przemysłowej, ramionach robotycznych, robotach współpracujących, inteligentnym sprzęcie produkcyjnym, automatyce magazynowej i systemach montażu precyzyjnego . Ich niewielkie rozmiary i niezawodne działanie sterujące sprawiają, że nadają się do zastosowań wymagających dokładnego chwytania, pozycjonowania i powtarzalnych ruchów.
Odpowiedź BESFOC:
Przy wyborze zintegrowanego serwomotoru do chwytaka robota ważnymi czynnikami są wymagany moment obrotowy, prędkość, dokładność pozycjonowania, rozmiar silnika, metoda komunikacji i środowisko pracy. BESFOC zapewnia różne zintegrowane rozwiązania w zakresie serwomotorów i opcje dostosowywania, aby spełnić określone wymagania aplikacji robotycznych, pomagając klientom osiągnąć niezawodne i wydajne sterowanie ruchem.





















































